Возможно мы нарушим порядок настройки дрона на программном обеспечении Ardupilot, но сегодня нам захотелось подключить приемник ELRS и попробовать процесс сопряжения с пультом.
Настройки будем проводить на примере отечественной связи "Радуга".
Данный мануал будет применим к любому типу приемников и передатчиков работающих по протоколу ELRS.
Монтаж приемника "Радуга": подключение к полетному контроллеру на ПО Ardupilot
Ранее мы рассказывали как прошили полетный контроллер SpeedyBee F405 V3 на программное обеспечение Ardupilot:
Для начала сразу же разберем вопрос - куда мы можем припаять модуль связи?
Для ответа нам стоит обратиться к документации, где расписаны возможные подключения к контактам полетного контроллера SpeedyBee F405 V3:
- SERIAL0 -> USB;
- SERIAL1 -> UART1 (DJI-VTX, с DMA);
- SERIAL2 -> UART2 (RCIN, с DMA);
- SERIAL3 -> UART3;
- SERIAL4 -> UART4 (подключен к внутреннему модулю BT, в настоящее время не может использовать ArduPilot);
- SERIAL5 -> UART5 (Телеметрия ESC);
- SERIAL6 -> UART6 (GPS, с DMA).
Мы видим что для подключения модуля связи нам потребуются контакты UART2.
Устанавливаем на раму приемник "Радуга".
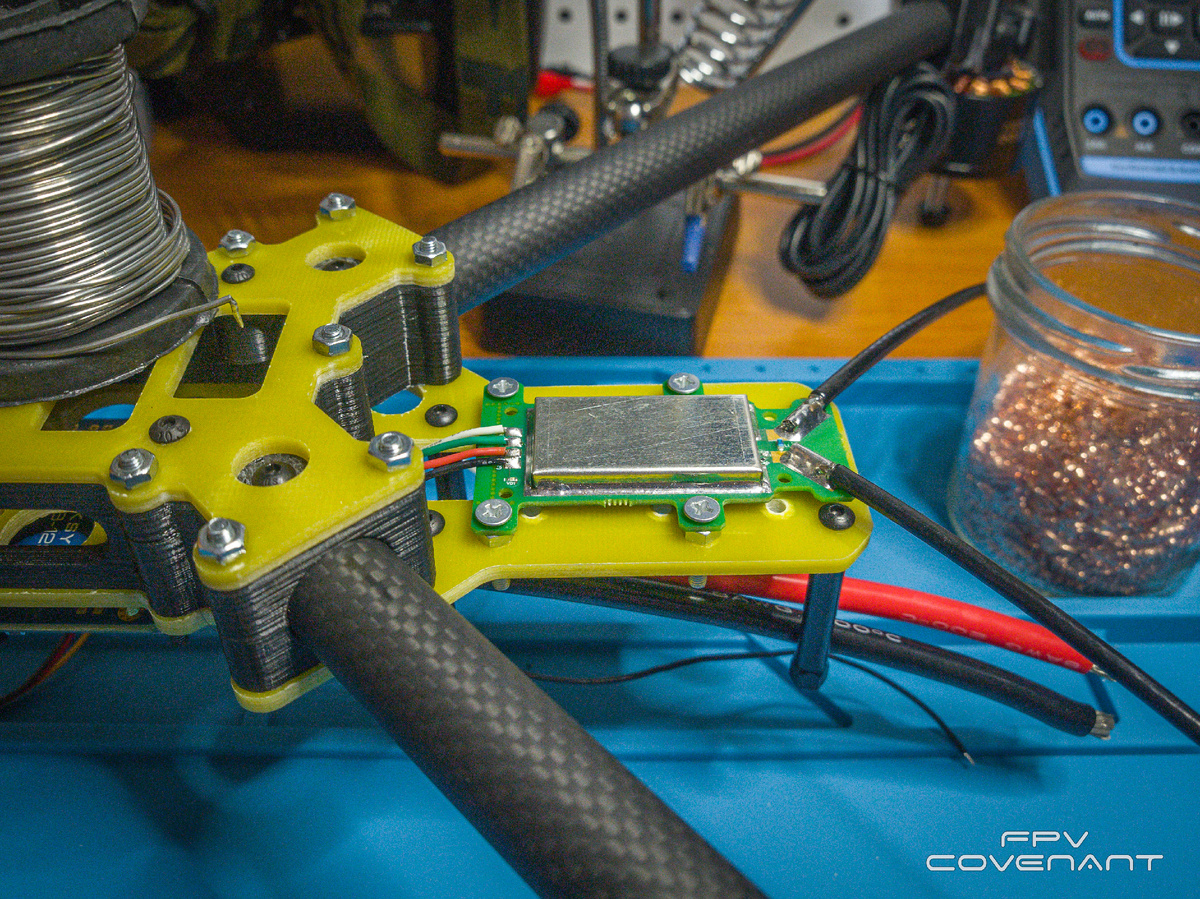
Следующим шагом припаиваем провода между приемником и полетным контроллером.
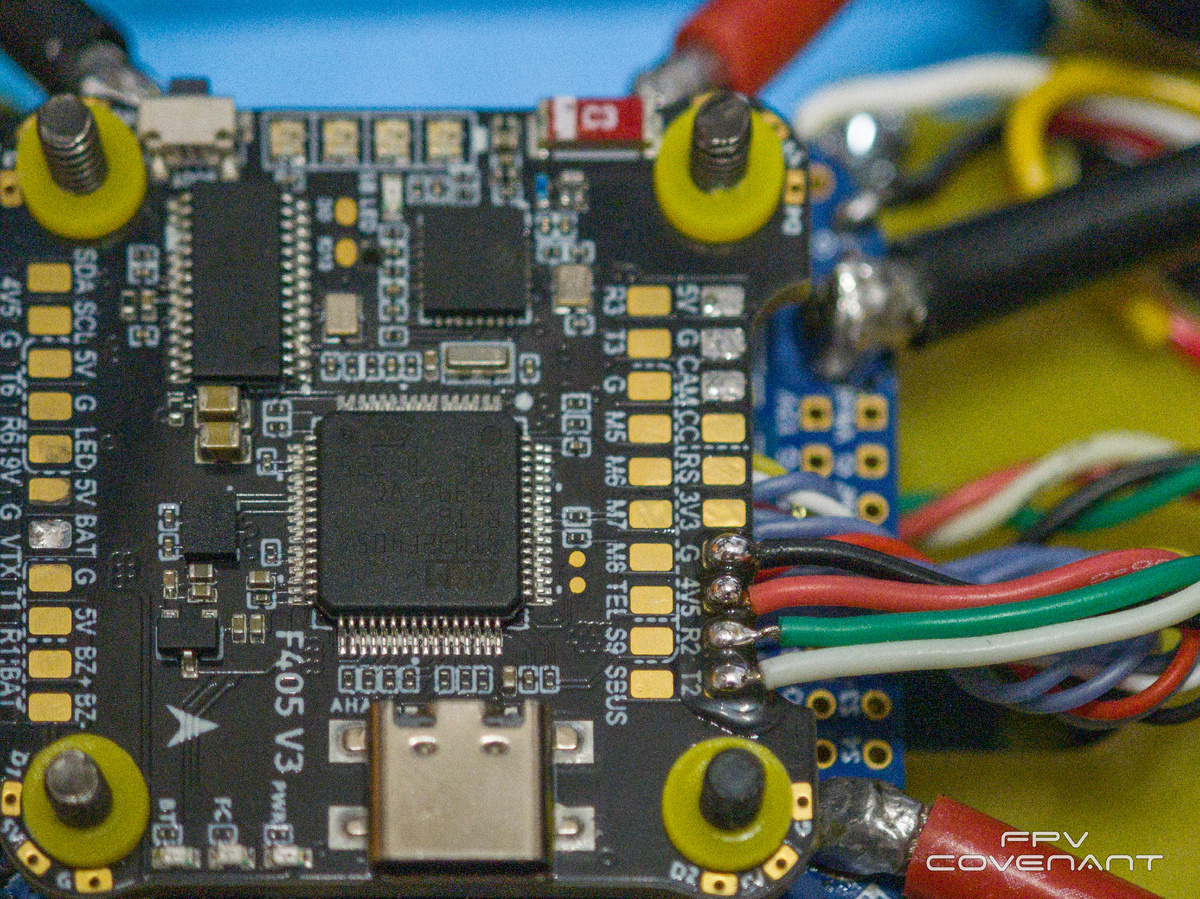
ТХ-контакт приемника "Радуга" отправляет или передает сигналы управления, полученные от пульта управления контроллеру полета (FC) и должен быть подключен к контакту RX полетного контроллера (FC).
RX-контакт приемника "Радуга" принимает или получает телеметрические данные (напряжение батареи, ток, GPS-координаты) от полетного контроллера (FC) для отправки обратно в пульт управления - должен быть подключен к контакту TX полетного контроллера (FC).
Контакт GND или G должен быть подключен к контакту GND на контроллере полета (FC).
Контакт VCC или 5 приемника должен быть подключен к контакту 5v (или 4v5) на контроллере полета (FC).
Мы сейчас не будем рассказывать, как произвести биндинг приемника с передатчиком ELRS. О настройках ранее уже рассказывалось в статье:
Будем считать, что приемник с пультом имеет одинаковую Бинд-фразу и происходит удачное сопряжение.
В ситуации с системой связи "Радуга" сопряжение происходит автоматически и ковыряться с настройками не требуется.
Теперь нам потребуется произвести настройки прошивки Ardupilot для корректной работы.
Загружаем Mission Planner и подключаем к полетному контроллеру USB провод.
Для начала нам требуется выбрать порт подключения (в нашем случае COM7) и нажать CONNECT. Заходим в раздел CONFIG и выбираем FULL PARAMETR LIST.
Перед нами появится таблица со всеми параметрами программного обеспечения Ardupilot.
Так как мы настраиваем параметры порта Serial 2 на который припаяли приемник, то соответсвенно и выбираем его в списке.
В таблице изменяем значения на:
Serial2_protocol = 23 (RCIN);
Serial2_baud = 115.
И нажимаем справа Write Params.
Далее переходим в раздел RSSI.
Тут в таблице нас интересует параметр:
RSSI-type = 3.
И нажимаем справа Write Params.
Далее переходим в раздел RC.
Выбираем параметр RC_options и в открывшемся меню ставим галочки над параметрами:
- Arming check throttle for 0 input;
- Use passthrough for CRSF telemetry;
- Suppress CRSF mode/rate message for ELRS systems;
- Use Link Quality for RSSI with CRSF;
- Annotate CRSF flight mode with * on disarm;
- Use 420kbaud for ELRS protocol.
И нажимаем справа Write Params.
Теперь отключаемся от Mission Planner, отключаем разъем USB, чтобы перезагрузить полетный контроллер.
Подключение пульта ELRS к ардупилот: калибровка
Подключаем к полетному контроллеру аккумулятор, включаем пульт управления. Бинд приемника и пульта при правильных настройках произойдет автоматически.
Подключаем USB провод к полетному контроллеру, запускаем Mission Planner и коннектимся.
Переходим во вкладку SETUP и выбираем раздел Radio Calibration.
Тут мы можем подергать стиками на пульте и увидеть как двигаются полоски в окне - значит пульт удачно настроили.
Откалибруем пределы работы стиков и кнопок управления пульта. Нажимаем Calibrate Rate и нажимаем все переключатели на пульте и переводим стиками в крайние положения.
Увидим красные флаги указывающие на крайние значения каналов. По окончанию нажимаем Done.
Процесс настройки пульта удачно окончен.
Сегодня мы оказались на шаг ближе к запуску своего тестового дрона на программном обеспечении Ardupilot.