Большинство наших статей на канале посвящено работе с программным обеспечением для полетного контроллера - Betaflight. Но в мире, где технологии развиваются с невероятной скоростью, способность работать с платформой Ardupilot становится не просто полезным навыком, а настоящим конкурентным преимуществом для инженеров, разработчиков и энтузиастов, стремящихся создавать автономные системы будущего.
Сегодня мы рассмотрим возможность установки Ardupilot на полетный контроллер Speedybee f405 v3. Это не просто прошивка, а целая экосистема, которая даёт возможность адаптировать устройство под любые задачи, которые требуют высокой точности и стабильности.
Установку Ardupilot на полетный контроллер можно осуществить несколькими способами. Мы остановимся на прошивке с помощью программы STM32 Cube Programmer.
Установка Ardupilot с помощью STM32 Cube Programmer
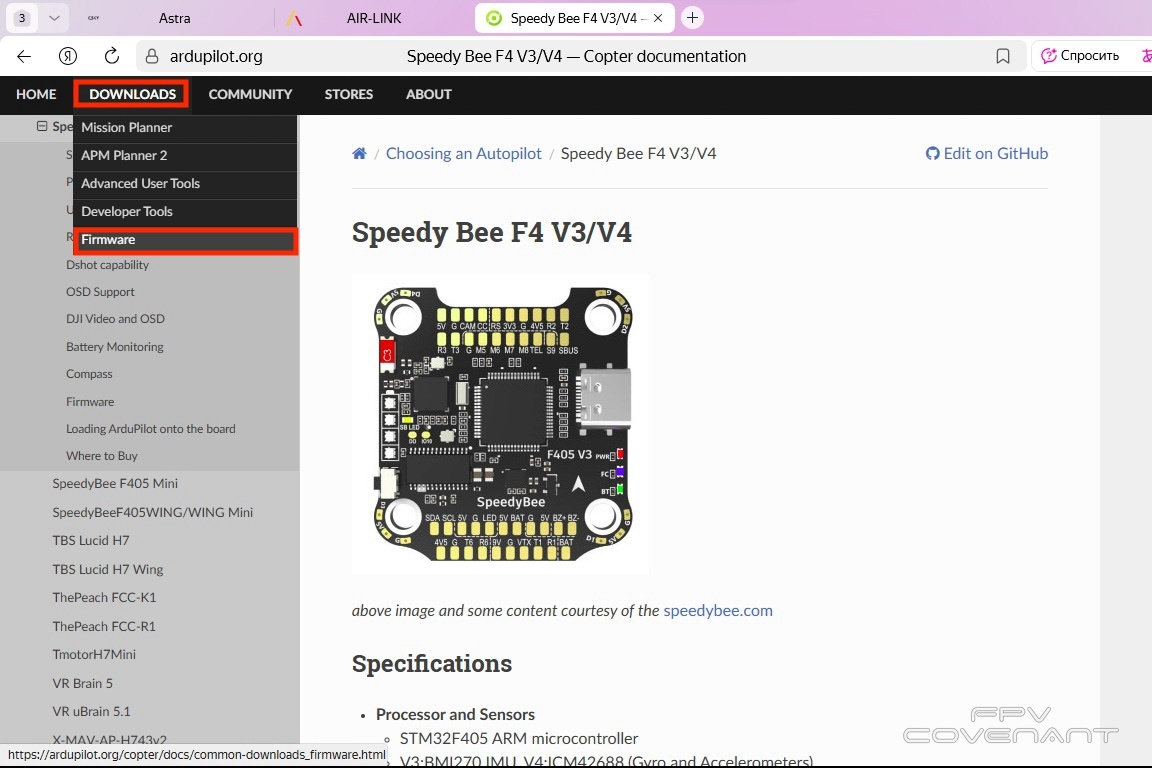
Для начала мы переходим на сайт Ardupilot и заходим в раздел Downloads, где выбираем Firmware (прошивки).
Далее нам требуется выбрать тип дрона, который мы планируем собрать. Мы выбираем коптер.
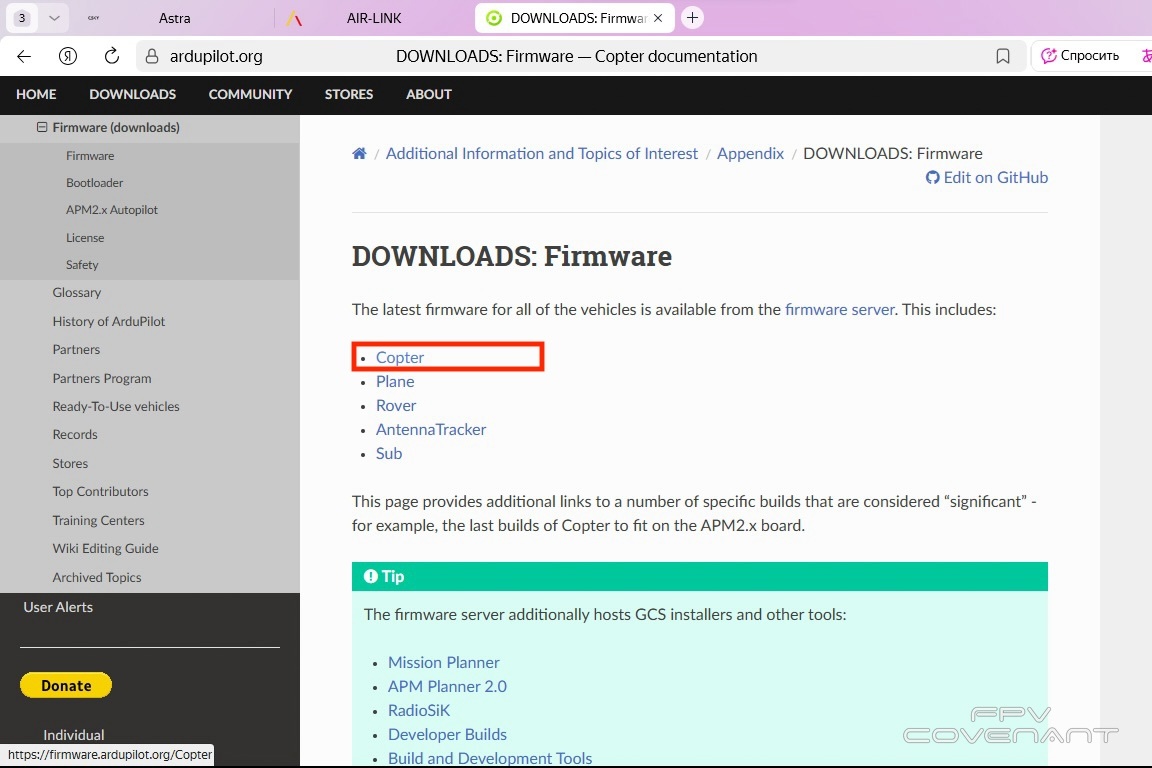
Далее мы попадаем в репозиторий с прошивками.
Тут очень важно ничего не перепутать. Заходим в папку Stable. И ищем папку SpeedybeeF4V3.
Зайдя в найденную папку мы можем наконец скачать прошивку для полетника. Скачиваем ее.
Итак подготовительный этап пройден.
Далее скачиваем и устанавливаем программу STM32 Cube Programmer. Если кто-то не может найти дистрибутив - пишите в комментариях, мы скинем.
Чтобы произвести прошивку полетного контроллера, нам потребуется перейти в DFU Mode - режим загрузчика. Для этого зажимаем кнопку Boot на полетном контроллере и не отпуская ее подключаем USB провод.
На этом этапе полетный контроллер должен определиться в Windows как устройство и самостоятельно установить драйвера. Если этого не произошло, в комментариях объясним как это сделать.
Запускаем приложение STM32 Cube Programmer.
Для начала нам потребуется выбрать тип подключения полетного контроллера - USB. Далее мы выбираем порт - USB и нажимаем на вкладку Open file.
В открывшемся окне выбираем нашу скачанную прошивку и нажимаем на кнопку Download.
Об удачной прошивке нас уведомит всплывающее сообщение.
Теперь нам потребуется проверить работоспособность нашей прошивки и полетного контроллера.
Скачиваем программное обеспечение Mission Planner и запускаем его.
Нам требуется выбрать правильный порт под которым определился полетный контроллер или можно выбрать режим AUTO и нажимаем CONNECT.
После удачного подключения мы можем наклонить в разные стороны полетный контроллер и посмотреть, как в программном обеспечении наклоняется горизонт.
Следующим этапом мы установим полетный контроллер в наш ранее собранный дрон ТУРА и выполним настройку оборудования.