Приветствую уважаемые Друзья, читатели, коллеги. Работал с серводвигателями марки CMMR по EtherCAT.
Оставляю здесь в статье нюансы.
Если есть вопросы пишите в ТГ-канале "Ты же инженер АСУ ТП".

Конфигурация привода осуществляется с помощью программы VECObserve.
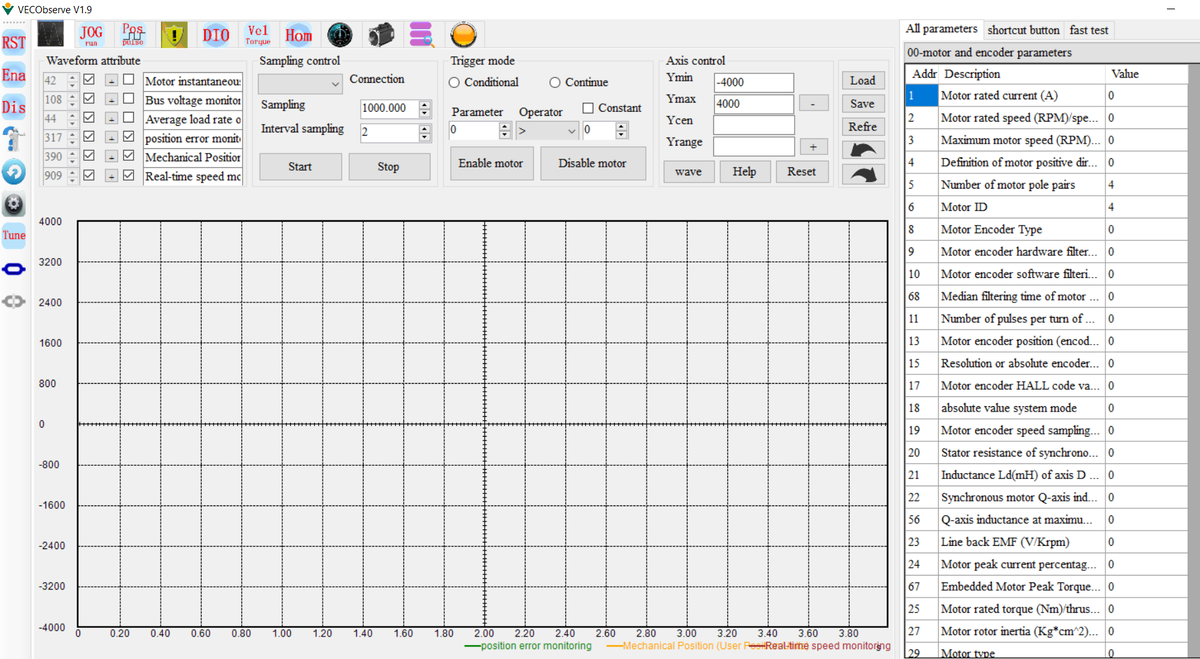
Установление соединения с сервоконтроллером в
программе Vecobserv
Нажмите на пиктограмму подключения, появится окно настройки
подключения. Нажмите ОК.
Если у вас несколько COM портов на компьютере, то вы можете выбрать
нужный, как показано на картинке.
При успешном подключении, значения параметров в правом столбце
станут зелеными, а внизу будет строка «Connected»
Ввод в эксплуатацию сервокомплектов CMMR-AS
Предварительно надо сбросить сервоконтроллер к заводским
настройкам.
Затем настраиваем нужный мотор.
Выбрать пиктограмму мотора в верхней части Vecobserv.
Нажать кнопку «Complete matching».
- Перейти к выбору мотора, набрав начало названия EMMR
- В открывшемся списке выбрать необходимый мотор.
- Нажать ОК.
- Подождать когда сервоконтроллер перезагрузится.
- Перезапустить Vecobserv
- Убедиться, что новые параметры применились. (посмотреть, например,
P00.01, - номинальный ток мотора)
Настройка адреса узла Ethercat
Для некоторых ПЛК, в частности для OMRON, необходимо явно указать адрес узла Ethercat. Это легко сделать через параметр P08.41. Затем перезагрузить сервоконтроллер.
Затем мы осуществляем первую настройку драйвера с двигателем. В принципе у многих производителей идентичная ситуация. Для того чтобы всё адекватно работало нужно сделать обучение энкодера с драйвером. Иначе будет неадекватная работа сервопривода.
Чтобы проверить работоспособность сервокомплекта переходим в меню JOG. Нажимаем Set Enable и пробуем запуститься, если всё ровно, то не должно быть рывков, визгов и т.д.
После этого нам нужно выключить данный режим нажать на кнопочку ниже, иначе не получится запустить через контроллер.
В этом параметре бит должен быть снят, чтоб сервак был в сетевом режиме.
После этого внести показания абсолютного энкодера в параметр 310. Так мы получаем коэффициент перерасчета абсолютной позиции привода.
Всем пока-пока.