Всем привет! Недавно писал статью о защите от индуктивной нагрузки, и во время поиска материалов по обратной ЭДС выяснилось, что значительная часть статей про это содержит в себе отсылки к Тесле, Серлу и прочим летающим тарелками. Было страшно, но я сделал выводы - провода для игрушечного танка не нужны! Нужно радио. Тем более опыт какой-никакой есть.
Вступление.
Проект радиоуправления может быть разного уровня сложности. От использования просто готового комплекта, например flysky fs-i6 до проектирования сложнейших систем с огромной дальностью действия, например управление луноходом с земли. Возьмём что-то среднее. Ближе, конечно же, к готовым решениям. Но, возможно, что-то сложное и будет реализовано не готовым модулем.
Почти что ТЗ.
Значит, что нам нужно:
- Разработать систему радиоуправления гусеничной платформой.
- Разработать передающую часть.
- Обеспечить интерпретацию набора команд с элементов управления.
- Передавать их по радио непрерывно.
- Разработать приемную часть.
- Обеспечить интерпретацию команд, принятых по радио для управления исполнительными устройствами.
Подробнее про передающую часть:
- Передача должна осуществляться на разрешенной частоте. Выберем 433Мгц.
- Пакеты с командами должны отправляться как можно чаще.
- Необходимо формировать пакеты исходя из состояния управляющих элементов. Пусть пока что это будут те самые тумблеры.
Подробнее про приемную часть:
- Приемник, естественно, так же должен работать на частоте передатчика 433Мгц.
- Команды, принятые приемником должны выполняться только пока идет передача с задержкой между "дерганным" управлением и скоростью реакции человека. Со смещением в сторону обеспечения плавности.
3. Так же необходимо реализовать управление исполнительными устройствами - коллекторные моторы,
и электропитанием приемной и исполнительной части.
Выбранные компоненты.
Радио.
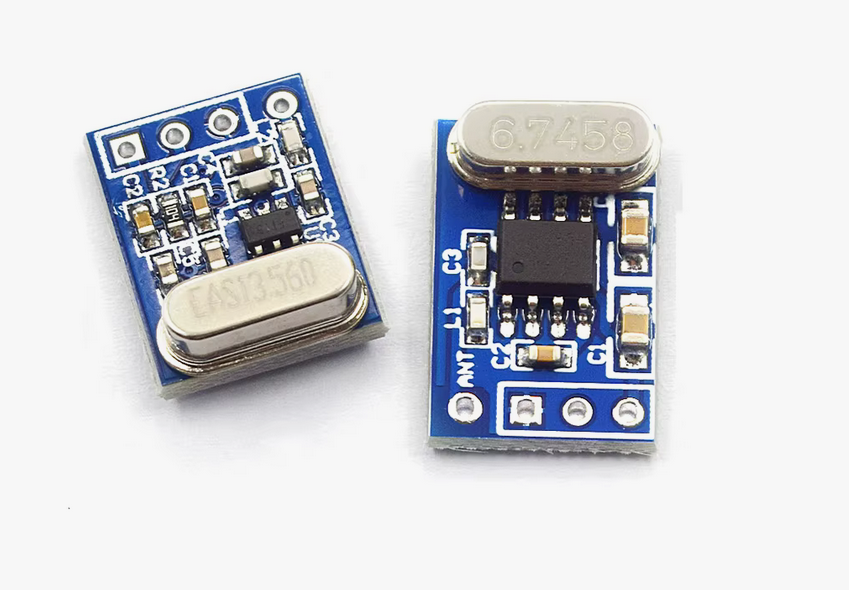
В качестве приемной и передающей частей можно использовать такие модули на 433Мгц. Они хорошо работают и в сети масса примеров их использования. Дальности сигнала для управления игрушкой в зоне прямой видимости хватит за глаза. А для ардуино, например, есть масса готовых библиотек.
Питание.
Хорошо бы использовать Li-Ion аккумулятор и плату защиты TP4056 к нему.
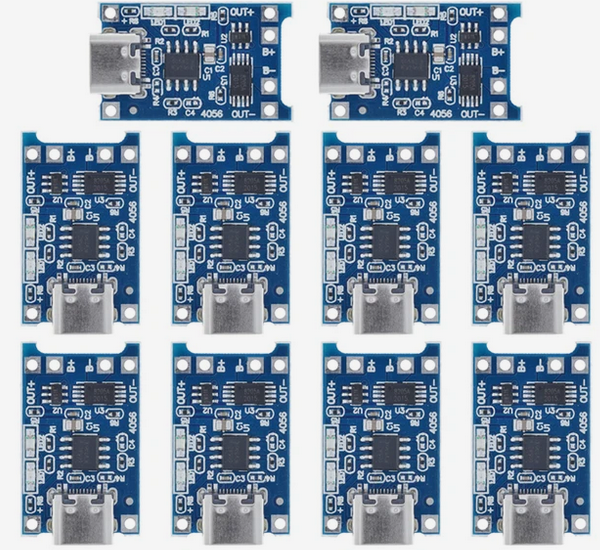
Например такие зарядные модули обойдутся всего в 150р за 10 штук. Уму не постижимо, конечно.
Микроконтроллер.
В качестве мозга нашего радиоуправления я буду использовать CH32V003F4P6. 32 бита непревзойденной мощи RISС-V за 11 рублей.
Его возможностей нам с головой хватит и на текущий функционал и на будущие доработки.
Управление коллекторными моторами.
Тут тоже есть где разгуляться. Есть огромное количество готовых микросхем и модулей, которые смогут обеспечить и управление и защиту. Но я, как обычно, сделаю что-то свое.
Двигатель почти ничего не потребляет и ему такого управления вполне хватит. А я снова попробую сделать плату сам ненавистным ЛУТом. Хотя всё остальное тоже бы хотелось иметь на одной плате, а не модулями.
Заключение.
Самое главное в любом деле - это план! А он теперь есть. Осталось дело за малым - создать схему, написать прошивку, изготовить платы, прошить контроллеры, собрать всё и отладить. И можно будет радоваться жизни, играя с малюсеньким самодельным танчиком.
Всем спасибо за просмотр! Как всегда буду рад комментариям и критике. До свидания!
P.S. Приемную часть нарисовал. Осталось развести плату и можно будет двигаться дальше. Как видно, я всё же решил распаять приемник самостоятельно, а не использовать готовый модуль. Это хоть и страшно, ведь на высоких частотах дорожки на плате превращаются в пугающее нечто под названием полоскИ, но думаю, дальность без сложных рассчетов, не упадет ниже 40 метров. Проверим удачу и дадим вызов техническому опыту.