В прошлый раз мы обсуждали возможность обмена данными между датчиком и ПЛК EVCO по Modbus RTU, а также разобрались, как это настроить. А теперь представим, что нам необходимо реализовать опрос ПЛК четырёх датчиков, соответственно запрограммировать четыре команды. На рис.1 приводится общая структура опроса датчиков.
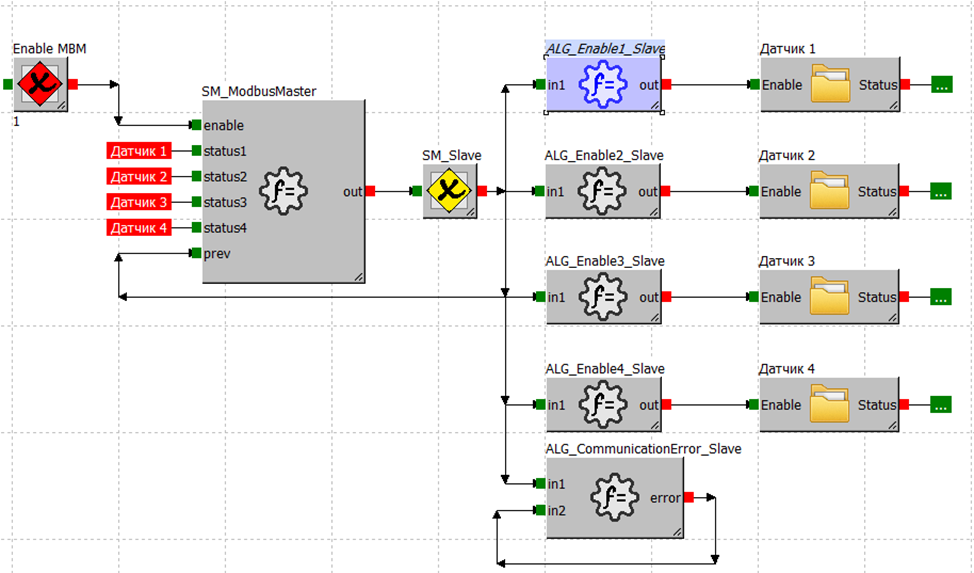
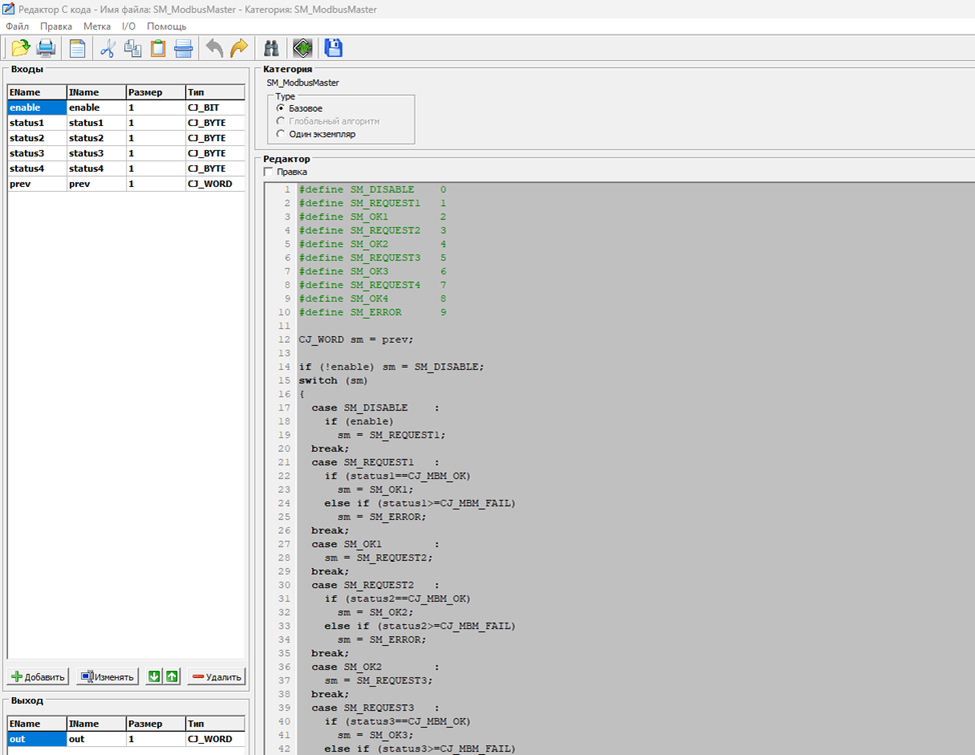
Блок «SM_ModbusMaster» анализирует статус блоков «ModbusMaster_ReadSingleHoldingRegister» и разрешает или запрещает отправлять следующий запрос, ведь, если отправлять запросы просто по времени, например каждую секунду, то, произойдёт коллизия с наложением данных, которая приведёт к ошибкам связи. Программный код блока «SM_ModbusMaster» приводится на рис.2.
Блок «SM_ModbusMaster» выдает команду разрешение, которая поступает на блоки «AL_Enable_Slave». Блоки «AL_Enable_Slave» реализуют контроль очередности запросов от мастера устройства к подчинённым устройствам. Программный код блока «AL_Enable_Slave» приводится на рис.3.
В подпрограммах «Датчик» находиться структура, которую мы разбирали в прошлой публикации. Внизу расположен блок «ALG_CommunicationError_Slave», который является счетчиком ошибок. Программный код блока «ALG_CommunicationError_Slave» приводится на рис.4.
Если вы хотите улучшить свои производственные процессы и повысить эффективность работы, то оставляйте заявку на наше оборудование уже сегодня! Оставить заявку на нашем сайте