В некоторых случаях, для подключения датчика к ПЛК не хватает аналоговых входов. Решить задачу подключения датчика к ПЛК можно через протокол Modbus.
В этом посте мы разберем:
- Библиотеки для опроса по протоколу Modbus RTU
- Конфигурацию связи
- Схему для постоянного опроса
Начнем с того, что нам необходимо понять, как организовать обмен данными по Modbus RTU. ПЛК является мастером сети (ведущий). Датчик является подчинённым устройством (ведомый). В UNI PRO 3 есть специальная команда, которая находиться в библиотеке System/Modbus, называется ModbusMaster_ReadSingleHoldingRegister (Рис.1). Команда читает данные с одного конкретного регистра по протоколу Modbus RTU.
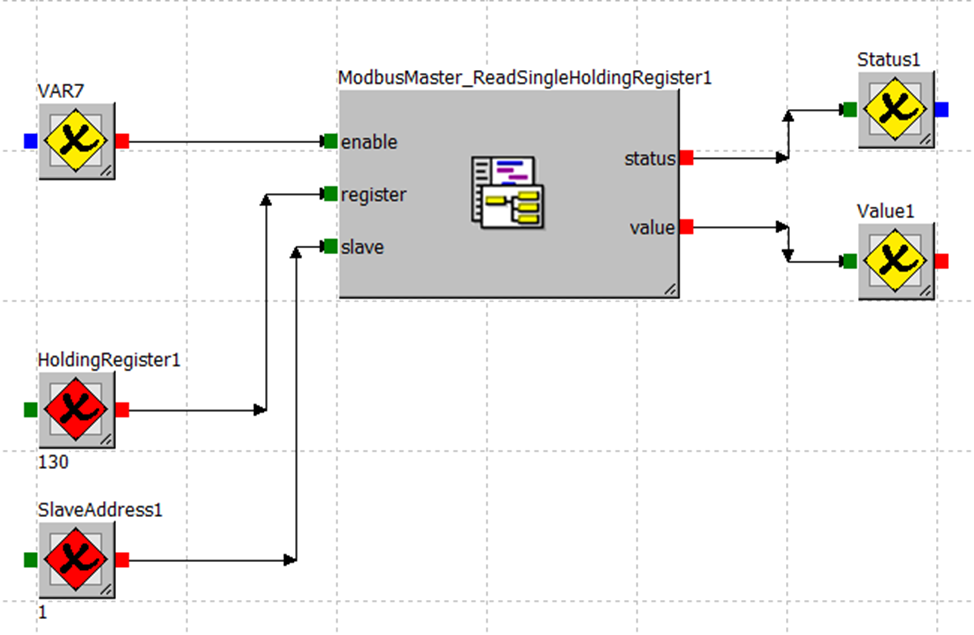
На рисунке 1 изображена конфигурация команды для чтения показаний датчика. На вход «Enable» подается сигнал активации блока (тип сигнала меандр). На вход «Register» адрес регистра, где хранятся показания датчика. Вход «Slave» адрес ведомого устройства. Спрва этот блок нам выводит статус запроса и само значение.
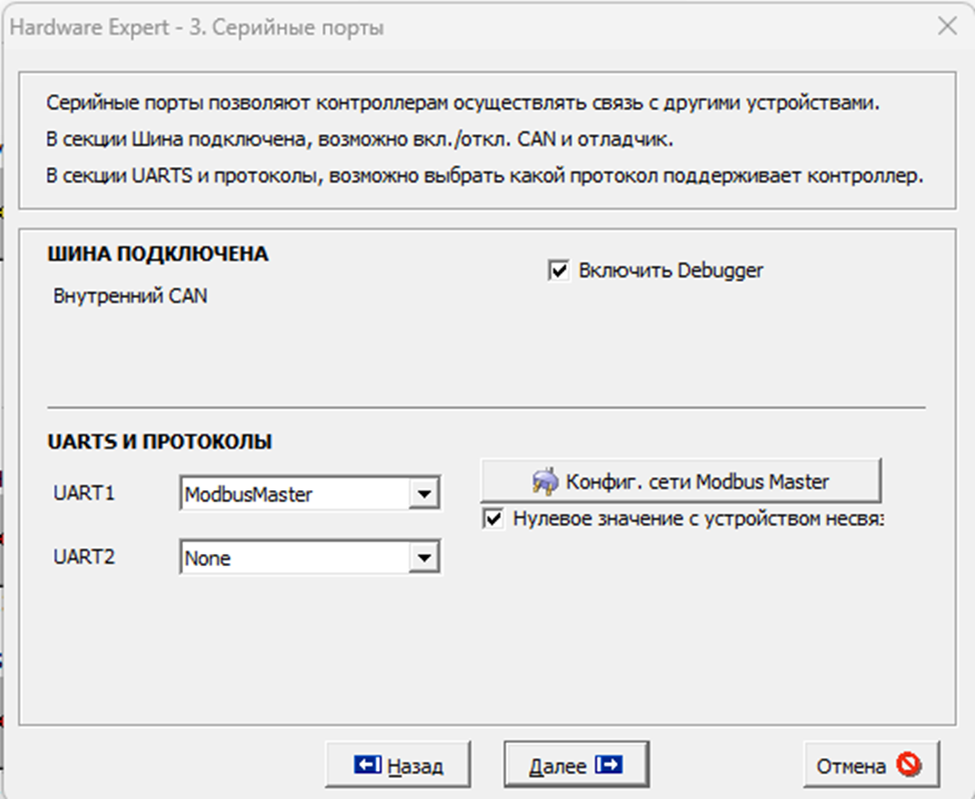
Разберем конфигурацию, которую нам необходимо задать последовательным портам ПЛК. В конфигураторе оборудования находим окно «Серийные порты» (Рис.2). В этом окне нам необходимо выставить в нужном порте функцию «ModbusMaster», что сделает ПЛК «Ведущим». Дальнейшие настройки в окне конфигурации не влияют на заданные настройки последовательных портов контроллера.
Обычно, при настройке контроллера, задают настройки устройства, как «Ведомого». Но для случаев, когда контроллер «Ведущий» настройки отличаются. Для «Ведомого» добавляются блоки «Адрес», «СтопБит», «Скорость» и «Четность». Для «Ведущего» блок «Адрес» не требуется. Нужно поставить блок «ModbusMaster_Timeout» (Рис. 3)
По умолчанию таймаут задан 1 секунда времени. В блоке можно задать значение таймаута на усмотрение разработчика.
Если вы хотите улучшить свои производственные процессы и повысить эффективность работы, то оставляйте заявку на наше оборудование уже сегодня! Оставить заявку на нашем сайте