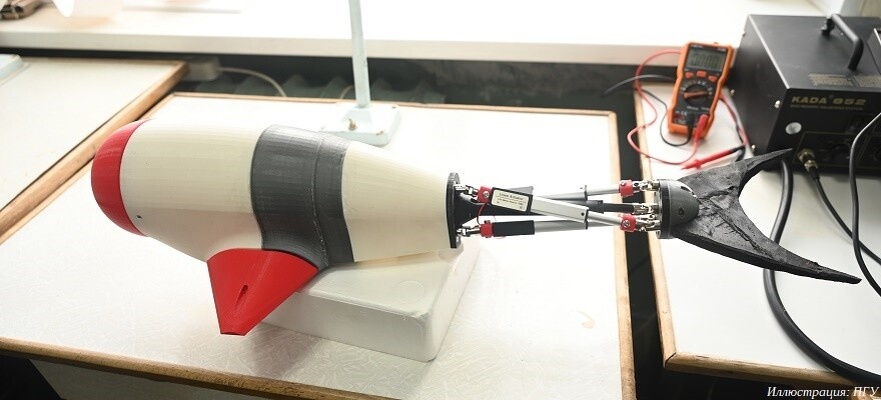
Специалисты Пензенского государственного университета разработали с применением технологий 3D-печати бионический подводный аппарат с адаптирующимся движителем, имитирующим движения хвостов тунцов и дельфинов.
Особенность разработки в способе передвижения: в механизм работы хвостовой части аппарата заложены техники плавания двух морских обитателей — тунца и дельфина, сообщает пресс-служба Министерства науки и высшего образования РФ. Большие, мощные хвосты тунцов расположены вертикально и позволяют развивать высокие скорости. Хвосты дельфинов расположены горизонтально, что помогает плавно передвигаться и с легкостью обходить препятствия. Сочетание двух техник плавания морских обитателей позволяет хвосту нового аппарата подстраиваться под конкретные задачи, быстро меняя направление движения и переключая виды плавания.

«Подвижная платформа ориентирует хвостовой плавник в соответствии с желаемым движением. Для каких-то целей будет использоваться режим плавания, как у тунца. Например, если нужно быстрее проплыть участок. Для задачи маневрирования под водой будет использоваться положение хвостовой части, как у дельфина — горизонтально», — рассказал аспирант ПГУ Илья Урваев.
Длина макетного образца составляет 0,5 м, диаметр — 20 см. В носовой части располагаются видеокамера и гидролокатор, помогающие ориентироваться в пространстве. В среднюю часть встроены основные электронные компоненты и брюшные плавники. Последние дают возможность изменять угол наклона и глубину погружения.
В этой же части располагается система управления, в состав которой входят блок управления и сбора данных, блок навигации и блок контроля хвостового движителя. Здесь же находится и флеш-память, где будет накапливаться собранная информация для передачи операторам. Реальный аппарат будет достигать полутора метров в длину и тридцати сантиметров в диаметре. Разработка отличается малой массой и шумностью, высокой маневренностью и низким воздействием на окружающую среду.
А у вас есть интересные новости? Поделитесь с нами своими разработками, и мы расскажем о них всему миру! Ждем ваши идеи по адресу news@3Dtoday.ru.