Числовое программное управление (ЧПУ) — это тип управления, при котором команды для станка представлены в цифровой форме. Эти команды объединены в Управляющую программу (УП) — алгоритм функционирования станка для обработки конкретной детали.
Основная задача программирования — точно указать траектории перемещения исполнительных органов станка (шпинделя с инструментом, суппорта, стола).
Исполнительные органы — это механические компоненты станка (каретки, суппорты, шпиндель), которые непосредственно осуществляют перемещение инструмента или заготовки.
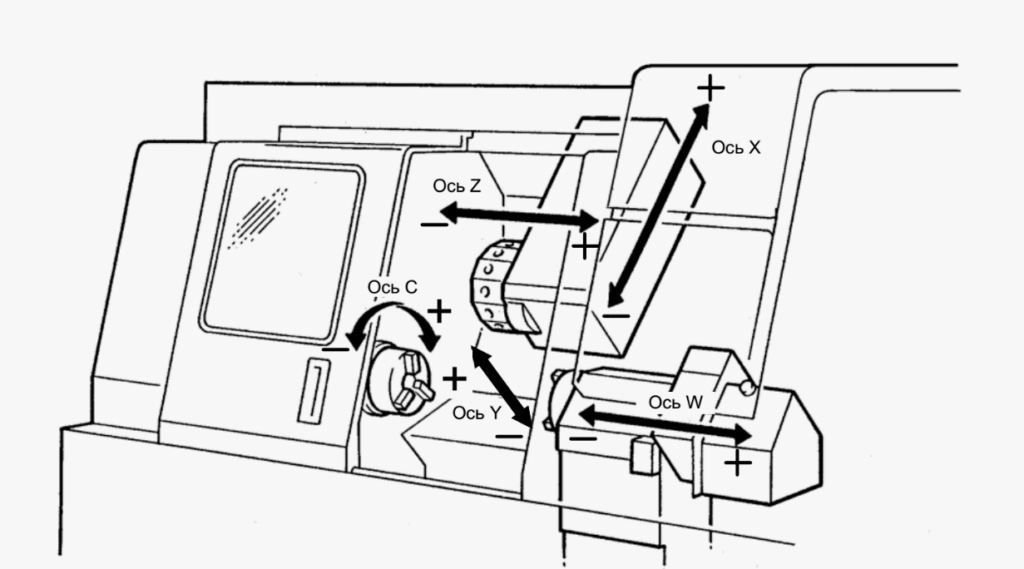
Для описания этих траекторий используется математическая модель — система координат.
Роль интерполяции
Представьте, что в УП есть команда: G01 X100 Y50 F500. Это означает "двигаться по прямой к точке (X100, Y50) со скоростью 500 мм/мин". Но как станок выполняет это движение?
Интерполяция — это процесс, выполняемый контроллером ЧПУ, по расчету промежуточных точек на заданной траектории между начальной и конечной точками и выдачи управляющих сигналов на приводы всех задействованных осей для синхронного движения по этой траектории.
Проще говоря, интерполятор "дорисовывает" путь между точками, которые программист поставил в программе.
Основные типы интерполяции, задаваемые в УП
1. Линейная интерполяция (G01):
Траектория: Прямая линия.
Задача контроллера: Рассчитать такое соотношение скоростей движений по осям X и Y, чтобы результирующее движение было строго прямолинейным.
Применение: Фрезерование уступов, торцевание, сверление по прямой.
2. Круговая интерполяция (G02 / G03):
Траектория: Дуга окружности.
Задача контроллера: По заданным параметрам (координаты центра I, J, K или радиус R) рассчитать дугу и синхронизировать движение осей так, чтобы инструмент двигался по этой кривой с постоянной скоростью подачи.
Применение: Обработка галтелей, скруглений, отверстий большого диаметра.
Как работает интерполятор? (Упрощенная модель)
Контроллер работает дискретно (циклами). На каждом цикле он:
Считывает из УП блок команд (например, G01 X100 Y50).
Вычисляет требуемую траекторию (прямую).
Определяет количество "шагов" (импульсов) для каждого привода осей X и Y, необходимое для прохождения траектории за заданное время.
Выдает последовательности импульсов на драйверы двигателей. Для линейного движения соотношение частот импульсов по осям постоянно. Для кругового — постоянно пересчитывается по математическим формулам окружности.
Синтез: Как системы координат и интерполяция работают вместе
Программист создает УП, используя систему координат заготовки. Он задает целевые точки (X, Y, Z) и тип движения (G-код).
Контроллер ЧПУ принимает программу. Зная смещение системы координат заготовки относительно машинной системы, он преобразует координаты УП в фактические машинные координаты.
Интерполятор контроллера берет две точки (текущую и целевую) и генерирует плавную траекторию между ними, рассчитывая управляющие сигналы для каждого привода.
Исполнительные органы (двигатели, приводы) получают эти сигналы и точно перемещают инструмент по рассчитанной траектории.
Пример:
G90 G01 X50.0 Y0 Z-10.0 F200
G90 — работа в абсолютной системе координат (относительно нуля детали).
G01 — команда на линейную интерполяцию.
X50.0 Y0 Z-10.0 — целевая точка в системе координат заготовки.
Контроллер вычисляет машинные координаты и плавно ведет инструмент по прямой к этой точке.
Таким образом, система координат — это язык, на котором программист "объясняет" станку геометрию детали. А интерполяция — это интеллектуальный механизм, который превращает этот язык в реальные, точные и согласованные движения. Понимание этой связки является фундаментом для чтения, написания и отладки любых управляющих программ для станков с ЧПУ
