Европейские исследователи разработали роботизированную ногу, которая приводится в движение электрогидравлическими искусственными мышцами. Исследователи скопировали движения ног реальных живых существ.
Исследователи смотрят на роботизированную ногу. Фото: Вольфрам Шайбле / MPI-IS Метод электрогидравлического привода принципиально отличается от предыдущих методов перемещения роботов, которые сегодня выполняют различную работу на заводах. Обычно используются электродвигатели: использование искусственных мышц — нечто новое. Такие подходы могут дать роботам такую же способность двигаться, как и реальным живым существам.
Как и ноги человека или животного, нога робота имеет так называемые мышцы-разгибатели и сгибатели, поэтому она может двигаться в обоих направлениях. Эти электрогидравлические приводы, называемые HASEL, крепятся к скелету робота с помощью своего рода сухожилий.
Актуаторы (законченное универсальное исполнительное устройство, электропривод) состоят из пластиковых пакетов, наполненных маслом, половина которых покрыта токопроводящим материалом – это электроды.
«Как только мы подаем напряжение на электроды, они притягиваются друг к другу за счет статического электричества. Когда я тру шарик о голову, мои волосы прилипают к шарику из-за того же статического электричества. При увеличении напряжения электроды становятся ближе друг к другу: в целом пакет с маслом становится меньше. Таким образом приводится в движение весь механизм», — объясняет исследователь Томас Бюхнер в пресс-релизе.
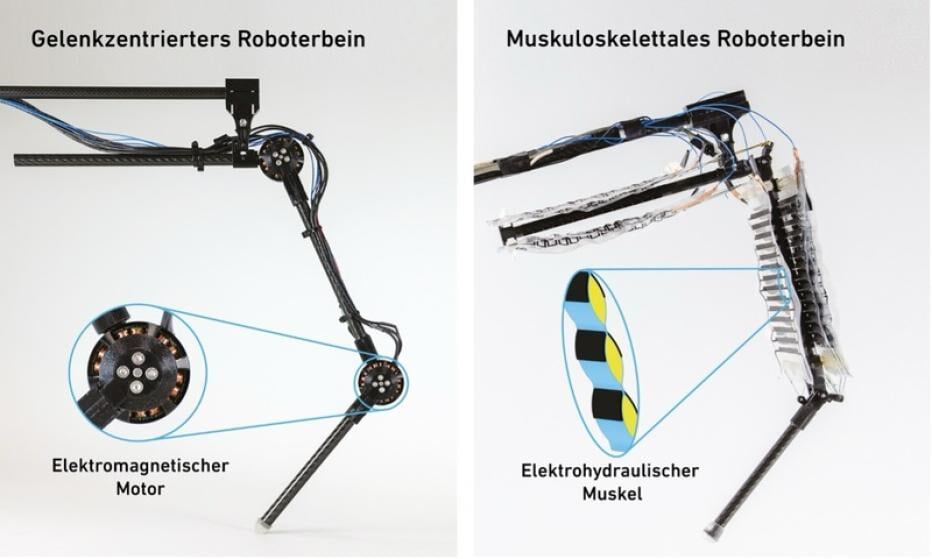
Нога робота (справа) в деталях. Фото: Томас Бюхнер и Тошихико ФукусимаПоскольку эти приводы расположены парами, они могут двигаться как настоящие мышцы: если одна мышца укорачивается, ее аналог одновременно удлиняется. Движения мышц контролируются компьютерной программой.
Благодаря специальной конструкции робот на таких ногах может прыгать по различным поверхностям, таким как трава, галька и большие камни. Устройство распознает местность, и робот сможет перепрыгивать препятствия.
Система очень гибкая, и робот на таких ногах сможет прыгать относительно высоко без необходимости использования особо сложных датчиков. В то время как в случае с электродвигателем датчик должен постоянно отслеживать угловое положение ноги робота, искусственная мышца быстрее адаптируется к окружающей среде.
Нога робота должна потреблять мало энергии для движения. Исследователи изучили, какая часть полученной энергии преобразуется в тепло. По сравнению с новой разработкой, традиционная нога с электроприводом генерирует значительно больше тепловой энергии, как показало сравнение с использованием тепловизионной камеры.
Тепловизионная камера показывает меньшее выделение тепла. Фото: Томас Бюхнер и Тошихико ФукусимаЭта нога является совместной разработкой Института интеллектуальных систем Макса Планка и Швейцарской высшей технической школы Цюриха. На данный момент разработка все еще находится на ранней стадии.
В будущем эта нога может внести вклад в так называемую мягкую робототехнику — область исследований, направленную на создание роботов из гибких, податливых материалов, которые смогут быстро адаптироваться к окружающей среде и лучше с ней взаимодействовать.