Представим, что в вашей жизни случилось радостное событие — на ПВЗ или на почту пришел первый FPV-дрон. Пульт у вас уже есть, очки/шлем — тоже. Но вот свой дрон вы держите в руках впервые. Полетит ли он “из коробки”? 100%, что нет. Чтобы он полетел, вам потребуется подружить его с пультом и кое-что настроить в Betaflight. В этой статье мы разберемся с самой базовой настройкой дрона для предстоящих полетов. Вперед!
Что такое RTF и BNF?
Но для начала выясним — а как вообще купить именно готовый дрон? Закажешь какой-нибудь iFlight Nazgul на Али, а приедет коробка с рамой, стеком и моторами. Сиди. Паяй. Страдай. Спрашивай. А хочется просто летать, не так ли?
Допустим, что на просторах Али и Озона вы нашли лот с фоткой собранного коптера. В описании черным по белому — RTF. Расшифровывается эта надпись как ready-to-fly, готов к полетам. То есть, по мнению продавца, ничего паять и настраивать не нужно, просто бери и лети. Это и есть готовый дрон. Другая часто встречающаяся аббревиатура — BNF, то есть bind-and-fly. Забиндил (связал дрон с пультом) и полетел. Наконец, третья надпись с похожей сутью — это PNP, то есть Plug-and-play, подключи и играй, но есть нюанс (о нем ниже).
Приемник на дроне
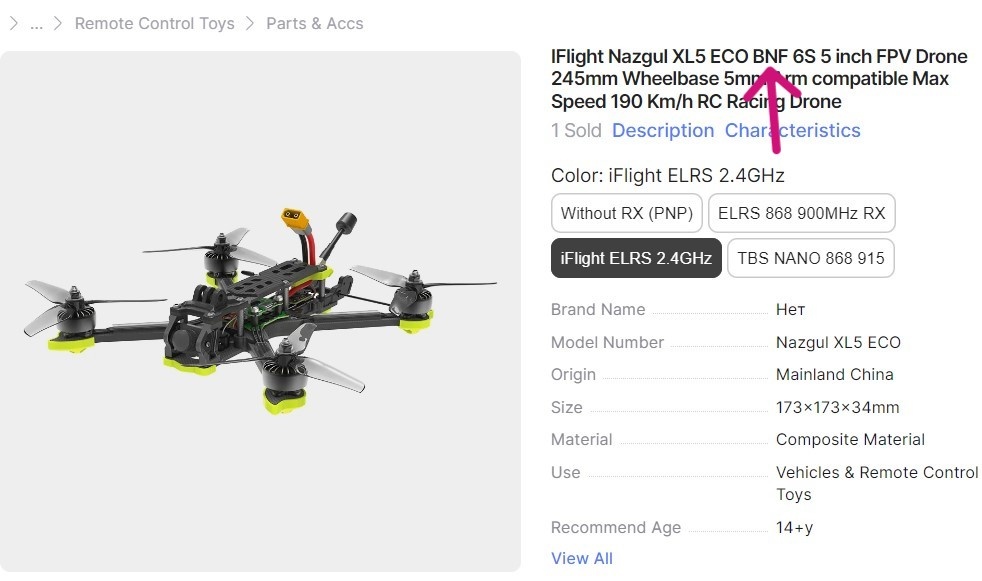
Ваш RTF/BNF-дрон понятия не имеет с каким пультом ему предстоит летать. Чаще всего, еще на этапе покупки продавец заботливо предлагает вам некие варианты (опции) товара. Наглядный пример показан ниже.

Очевидно, что покупать нужно такую версию, которая будет совместима с радиолинком вашего пульта или с радиолинком внешнего модуля. Чуть подробнее про пульты и радиолинки я писал в материале "Как выбрать пульт для FPV".
Для пульта TBS Tango 2 или пульта с внешним модулем TBS Crossfire вы выбираете версию дрона с CRSF/TBS Nano RX. Для пульта на ELRS 2.4 — версию с ELRS 2.4. Можно купить дрон вообще без приемника и припаять его самостоятельно — вероятно это выйдет чуть дешевле, но добавит вам квест “разобрать дрон на треть, найти пины для приемника, припаяться, проверить на КЗ”. Вот такие версии (без приемника) частенько и обозначаются как PNP (Не)полный список обозначений в лотах с расшифровкой представлен ниже.
Бинд (связь) приемника с пультом
Первым делом после распаковки купленного дрона и фоток в соцсети с подписью “Мой первый FPV-дрон, завтра лечу!!!” нужно его, очевидно, забиндить. Очень подробно процедура бинда приемника ELRS была разобрана по косточкам в статье “Всё про ELRS”.
Бинд приемника TBS Crossfire осуществляется еще проще: нажали menu на пульте, выбрали на экране пункт TBS Agent Lite, выбрали в открывшемся меню пункт Tango II XF, выбрали в открывшемся подменю пункт Bind. А на дроне с зажатой кнопкой бинда на приемнике (она там всего одна) подкинули питание. Дальше TBS-система все сделает сама — обновит прошивку на приемнике и забиндит пульт с приемником. Возможно, с пятого-шестого раза.
Помните о том, что далеко не все полетные контроллеры умеют питать приемник через USB-подключение. Например, Foxeer F405 V2 не умеет, и родной полетник дрона GepRC Mark 5 — тоже. Если при подключении шнура USB к полетнику на приемнике вообще ничего не горит, то это ваш случай. Тогда для питания приемника нужно подключать к дрону АКБ.
Признак того, что бинд прошел успешно
После успешного бинда при обязательно включенном пульте на приемнике дрона должен непрерывно гореть какой-нибудь диод — например зеленый. На экране пульта, если таковой у него имеется, также загорятся “палочки” радиосвязи. А еще, при попытке выключения пульта при забинденном приемнике, пульт выдаст предупреждение на экране — “receiver still connected”.
Повторение пройденного
В одной из моих ранних статей "Почему дрон не реагирует на пульт" я уже разбирал часть описанных ниже моментов. Там я рассказывал и про выставление протоколов, и про работу со вкладкой Ports и, в том числе, про "пропись" ARM. Но в этот раз все получилось куда последовательней. Повторение-мать учения!
Проверяем настройки связки пульт-приемник в Betaflight
И так, вы убедились в том, что пульт и приемник подружились. Что дальше? Производители дронов — не дураки и, скорее всего, уже выставили нужные настройки в Betaflight (прошивка полетника) так, чтобы связка приемник-пульт работала корректно. После бинда, естественно.
Корректность настроек проверяется на раз-два. Включаем пульт, убеждаемся, что приемник его увидел. Подключаем полетник дрона через USB в ПК и открываем клиент Betaflight. Заходим на вкладку receiver и… шевелим стиками на пульте. Если в ответ на движения стиков на вкладке receiver происходит движение полосок, то все отлично.
Но если вы паяли приемник на дрон самостоятельно или настройщик на заводе-производителе купленного коптера — тунеядец, то вам нужно выполнить еще пару действий.
Шаг 1. Первым делом открываем приемнику нужный UART. Подсмотреть его можно прямо на плате дрона — если проводки от приемника на полетник идут к площадкам с подписью RX2 и TX2, то этот UART нам и нужно “открыть” в настройках Betaflight. Не хотите крутить гайки и изучать полетник? Обратитесь к руководству по эксплуатации вашей модели дрона на сайте производителя, там должна быть эта информация.
Если вы решили летать с фирменным пультом DJI FPV Remote Controller 1 или 2, то функцию приемника у вас выполняют DJI Air Unit любого поколения или модуль Vista. Как узнать нужный UART для этого пульта? Смотрите распиновку DJI-разъема в описании к полетному контроллеру/дрону. С юнита в полетник сигнал от пульта отдается по отдельному юарту (непарному, парный тут для другого). Чаще всего он еще и подписан как SBUS. Тонкостям обозначений на полетнике, юартам и прочая посвящен отдельный материал "Как подключать и паять почти все к полетнику".
После того как вы узнали на каком юарте висит приемник, в клиенте Betaflight открываем вкладку Ports. И теперь просто делаем активной галочку в столбце Serial RX в строке нужного “юарта”. Обязательно нажмите на кнопку Save&Reboot (правый нижний угол) после включения галки.
Шаг 2. Теперь возвращаемся на вкладку Receiver. Здесь нужно корректно выбрать тип и протокол подключения приемника. Если у вас на руках старый вуп (Mobula, Meteor и т.д.), то в выпадающем списке Receiver Mode нужно выбрать пункт SPI Rx, потому что приемник фактически распаян на полетнике, прям как гироскоп. Если у вас на руках новый вуп, например BetaFPV Air65, или что-то отличное от вупа (пятерка, семерка, трешка, синевуп), то приемник занимает UART и поэтому для него в выпадающем списке Receiver Mode нужно выбрать пункт Serial (via UART).
Следующий пункт после выбора типа (Serial или SPI), это выбор протокола. Для приемников TBS Crossfire, TBS Tracer и любого приемника ELRS нужно выбрать протокол CRSF. Для работы связки юнит DJI-пульт DJI FPV Remote Controller выбираем протокол SBUS. Не забываем нажать Save&Reboot после выбора пунктов.
Выбор корректной схемы маппинга стиков
Первичная настройка позади — на вкладке Receiver в Betaflight двигаются полоски в ответ на движение стиков на пульте. Но двигаются как-то странно. Жмешь вверх стик газа — а двигается pitch, отклоняешь roll — двигается throttle (газ). А 3D-моделька дрона на экране вертится как сумасшедшая. Ой..
Чтобы каждое движение стика на пульте верно отзывалось в Betaflight нужно поменять маппинг стиков. Во всей той же вкладке Receiver, справа от полосок, открываем выпадающий список под строкой Channel Map и меняем текущий пункт на любой другой.
Сохраняемся кнопкой Save&Reboot и проверяем как полетник реагирует на стики теперь. Меняем (и сохраняем!) выбранные пункты в списке Channel Map пока схема движения стиков на пульте не начнет совпадать с фактическими движениями полосок осей в Betaflight (и моделька дрона "успокаивается").
Не получается? Нужную схему можно задать даже руками — просто впишите свой порядок осей, например “ATER1234” и не забудьте сохранить настройки перед проверкой.
По-хорошему, здесь же, во вкладке receiver нужно настроить endpoints. То есть сделать так, чтобы минимальные значения по всем четырем осям составляли 1000, максимальные — 2000, а средние никуда не гуляли и торчали ровно на 1500. Но это уже относится к тонким настройкам и не влияет на качество ваших первых вылетов. Откорректировать эндпоинты можно на пульте на вкладке Outputs. Двигайте стиком в каждом направлении (газ, яв, ролл, питч) по очереди и смотрите какой канал двигается на экране пульта. Нажимайте на него роллером и корректируйте значения Min и Max одновременно с отклонением стика до упора в крайние значения. Должно получится 1000-1500-2000. Повторяйте процедуру для каждой оси. Пара скринов ниже, но без подробностей.
Создание команды ARM, шаг 1: пульт
А вот без ARMа дальше никак, его нужно обязательно настроить. ARM — это команда на перевод всех базовых систем коптера в “боевое состояние”: запускаются моторы на холостой ход, повышается мощность цифрового юнита и т.д.
Возьмите в руки пульт и выберете любой рычажок/кнопку в его верхней части, которая будет отвечать за ARM. Никаких обязательных требований тут нет — можно выбрать кнопку, можно рычажок или даже трехпозиционную клавишу (как на Tango 2). Главное, чтобы вы не могли случайно нажать или задеть эту кнопку непосредственно в полете.
Идем дальше. Ваш пульт общается с полетником по определенным каналам. Первые четыре канала пульт-полетник уже заняты четырьмя осями стиков, которые мы настраивали выше. Теперь выбранную вами кнопку/рычажок арма лучше всего привязать к первому же свободному каналу в пульте, то есть к каналу №5 (CH5).
Важно понимать, что обозначения каналов в пульте и в Betaflight не совпадают. Канал CH5 в пульте — это AUX1 в "бете", CH6 равен бетафлаевскому AUX2 и так далее. Кстати, привязка команды ARM именно к AUX1 является практически обязательной для ELRS. Разработчики прямо об этом пишут — статус канала AUX1 передается с каждым пакетом данных в радиолинке, поэтому если вы хотите надежной связи по арму/дизарму с дроном, назначайте ARM именно на AUX1. Для "кросса" и других протоколов такого требования нет.
Первым делом нужно устранить возможные конфликты каналов. С завода большинство пультов на EdgeTX/OpenTX идет уже с предустановленной пачкой каналов. Лучше всего просто удалить их и назначить уже "свои" режимы для каждого нужного вам рычажка. Действуйте согласно инструкции в слайдах (листайте их вбок).
Теперь, когда "поляна" свободна и в пульте осталось только четыре канала (газ, питч, ролл и яв) приступим к назначению переключателя ARM. Действуйте согласно инструкции в слайдах (листайте их вбок).
Почти приехали! На нужный вам рычажок/кнопку вы только что повесили канал AUX1. Забегая вперед скажу, что точно также можно повесить на следующие каналы (CH6, CH7 и т.д.) "ауксы" №2, №3 и т.д.
Создание команды ARM, шаг 2: Betaflight
Осталось “рассказать” Betaflight что делать полетнику, когда активируется эта физическая кнопка, висящая на CH5. Открываем вкладку Receiver в Betaflight. Сразу после четвертого канала (основные, для передачи команд со стиков) идет пятый, обозначенный как AUX1. Пощелкайте рычажком/кнопкой, которую вы назначили на CH5-AUX1 в пульте, чтобы проверить, что все работает. Полоска должна двигаться в ответ на смену позиции рычажка/кнопки.
Приемник забинден (или забинжен?), полоски стиков корректно двигаются на вкладке Receiver, AUX1 отвечает на щелчки на пульте. 80% пути пройдено. Ура!
Переходим на вкладку Modes в Betaflight. Прямо вверху списка будет пункт ARM. Нажимаем в его ячейке кнопку ADD RANGE и двигаем на пульте выбранный нами рычажок/нажимаем кнопку. Видно, что маленькая оранжевая отметка перемещается туда-сюда при нажатии кнопки на пульте. Когда она переместится в крайнее правое состояние, мышкой переместите крупную оранжевую полоску над меткой также вправо. Так вы показываете полетнику: "когда я жму эту кнопку, заарми дрон". После всех манипуляций нажмите кнопку Save снизу. Теперь полетник знает по нажатию какой кнопки запускать моторы.
Точно также во вкладке Modes настраиваются и любые другие функции — от пищалки до автовозврата по GPS. Просто повторите на пульте все то, что описано в главе "Создание команды ARM, шаг 1: пульт" для других функций/каналов и возвращайтесь во вкладку Modes для назначения команд.
OSD и VTX: просто проверяем
Поскольку дрон готовый с завода, то в 99% процентов случаев помимо настроек во вкладках Receiver и Modes ничего в нем делать и не нужно. Но на всякий случай проверьте как себя чувствует заводской VTX и какие показания выводятся в OSD.
Во вкладке VTX не будет лишним проверить текущую выставленную мощность (речь, конечно, про аналог, на цифре все иначе). Поменяйте ее на ту, которая вам нужна (чем дальше летаете, тем выше мощность). Канал ваши очки поймают самостоятельно, 99% процентов приемников в очках умеют искать каналы в "эфире".
Во вкладке OSD нужно убедиться в том, что напротив пункта Battery average cell voltage стоит галочка — так вы увидите напряжение усредненной ячейки АКБ в полете и сможете вовремя посадить дрон перед фактическим исчерпанием батарейки. Можно также включить/проверить "включенность" следующих пунктов OSD меню:
1. Battery voltage — показывает общее напряжение батарейки
2. Fly mode — показывает текущий режим полета, то есть Acro, Angle, Horizon
3. RSSI dBm value — показывает текущий уровень мощности принимаемого радиосигнала
4. Link quality — показывает процент успешно приходящих пакетов принимаемого радиосигнала
5. VTX Channel — показывает текущий выбранный канал видеолинка (просто удобно)
Моторы, калибровка акселерометра и прочее
Поскольку в статье мы разбираем именно RTF-дроны, то и такие вещи как направление вращения моторов, протокол Dshot, телеметрия, калибровка акселерометра у них должны быть настроены/проверены уже на заводе. Если же описывать еще и эти процессы, то статья, боюсь, будет бесконечной.
Один последний совет для готового дрона: зайдите во вкладку и проверьте схему вращения моторов. Запомните куда какой мотор крутится на схеме и надевайте пропы на моторы в полном соответствии с оной. Атакующая плоскость (направленная чуть вверх) должна смотреть в сторону вращения мотора на картинке в Betaflight.
Первичная настройка готового дрона: чек-лист
Подытожим статью общим списком проверок-манипуляций с готовым дроном:
1. Радиолинк на дроне и на пульте совпадают
2. Приемник забинден с пультом
3. В Betaflight>Ports выставлена галка в столбце Serial RX для юарта, на котором висит приемник
4. В Betaflight>Receiver выставлен нужный тип и протокол радиолинка для приемника
5. В Betaflight>Receiver корректно отображаются движения стиков на пульте
6. В пульте, во вкладке Mixes настроен канал CH5 и на него назначена кнопка для ARM
7. В Betaflight>Receiver в ответ на нажатие кнопки на пульте с привязкой к CH5 двигается полоска у AUX1
8. В Betaflight>Modes выставлен режим ARM для канала AUX1
9. В Betaflight>VTX выставлена нужная мощность VTX
10. В Betaflight>OSD выставлена галки в пунктах Battery average cell voltage, VTX Channel, Fly Mode, RSSI dBm value и Link quality
11. В Betaflight>Motors проверено направление вращения моторов
12. Пропеллеры надеты на моторы в соответствии с текущей схемой вращения моторов
Если вы еще не растеряли влюбленность в FPV после прочтения такого мануала по "простой" настройке уже готового (!) дрона, то, поверьте — теперь это "всё" с вами надолго. Спасибо за внимание!
Отправить автору на пару рам Quadmula Siren F5 Split