Роботизированный захват, разработанный исследователями Университета штата Вашингтон, способен аккуратно снять яблоко с дерева и является частью будущего недорогого садового робота.
Инновационный захват является частью роботизированной установки, которая, как надеются исследователи, когда-нибудь будет выполнять сбор урожая в основном яблочном американском штате Вашингтон, чтобы уменьшить влияние дефицита рабочей силы на отрасль, пишет Тина Хилдинг в релизе WSU.
Исследователи недавно опубликовали свою работу в материалах 7-й Международной конференции IEEE по мягкой робототехнике.
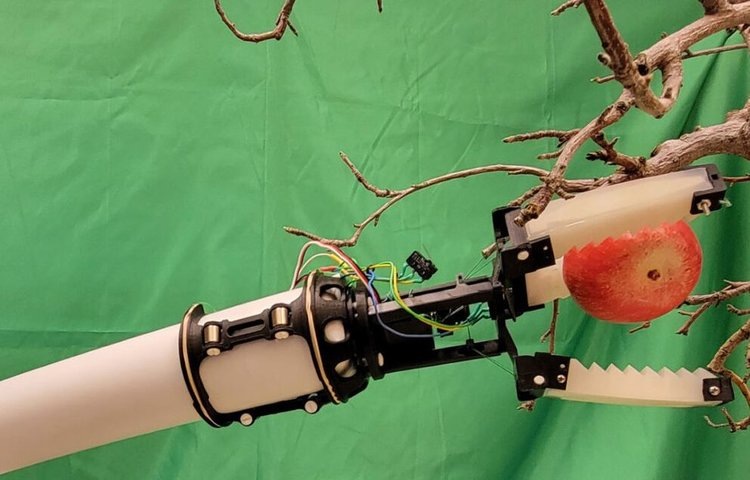
«Мы надеемся, что сможем помочь многим садоводам с созданием доступного по цене и эффективного робота для уборки яблоки. Захват использует три троса для перемещения пальцев из твердого пластика, напечатанных на 3D-принтере, кончики пальцев сделаны из силиконовой резины. Таким образом, пальцы достаточно мягкие, чтобы не повредить яблоки, но и достаточно сильными, чтобы снять яблоко с ветки. Стоимость изготовления роборуки составляет около 30 долларов, захват включает в себя переключатель, с помощью которого можно схватить яблоко и отпустить его. В испытаниях захват успешно собрал более 87,5% яблок в саду, не повредив их», - сказал Крис Нинатанта, доктор философии, студент Школы машиностроения и материаловедения WSU и первый автор статьи «Нехватка рабочей силы в Вашингтоне может нанести большой вред садам».
«Мы стремимся внести свой вклад в механизацию садоводства с помощью новых разработок», добавил Минг Луо – он и Манодж Карки, профессор кафедры инженерии биологических систем и директор Центра точных и автоматизированных сельскохозяйственных систем WSU, возглавляли разработку.
Штат Вашингтон лидирует в стране по производству яблок, и в 2022 году вклад этой отрасли в валовой внутренний продукт США составил более двух миллиардов долларов. По всему Вашингтону фермы ежегодно нанимают до сотен рабочих для работы в садах, в том числе для опыления, обрезки, прореживания цветов и сбора фруктов. Однако из-за старения населения и сокращения числа сельскохозяйственных рабочих-мигрантов фермерам приходится изо всех сил пытаться удовлетворить свои потребности в рабочей силе во время сезона сбора урожая.
В последние годы исследователи начали разрабатывать роботизированные системы сбора яблок, но те, которые были разработаны, дороги и сложны в использовании в садах.
Нинатанта, выросший в Якиме, штат Вашингтон, в детстве собирал фрукты вместе со своими родителями. Когда он начал работать с Луо над роботизированным захватом для яблок, он попросил родителей снимать на видео их работу, чтобы он мог смоделировать свой захват на основе работы людей.
«Так что некоторые элементы дизайна на самом деле вдохновлены моими родителями», — сказал он.
Теперь команда подключит свой легкий захват к недорогой роботизированной системе, которую они разрабатывают. Подобно надувным человечкам-трубкам, которые часто используются в наружной рекламе автосалонов, сама рука робота сделана из мягкой ткани, наполненной воздухом, но более жесткая, чем версия для рекламы.
В рамках проекта исследователи также работают над добавлением в свою систему встроенной камеры, которая сможет точно направлять руку, а также захвата, который может поворачиваться, подобно вращению человеческой руки, чтобы уменьшить повреждение стебля яблока. Они планируют опробовать систему в своей лаборатории, а затем в этом году поставить полевые опыты.
Источник и фото: WSU. Автор: Тина Хилдинг.
Интересна тема? Подпишитесь на наши новости в ДЗЕН | Канал в Telegram | Группа Вконтакте | Дзен.новости.