На днях как-то приiлось ставить прибор ТРМ12. и я задумался, как реализовать ПИД в Owen Logic. В Codesys 2.3 и 3.5 у меня есть понимание и рабочие алгоритмы, которые стоят на объектах. Для Программируемых реле у меня не было решений.
Приветствую всех, уважаемые читатели. Напишу краткий пост об этом решений.
ПИД с аналоговым выходом
На сайте ОВЕН выложили примеры для ПР205 о макросе с ПИД-регулятором. Но там с аналоговым выходом от 0-100 %.

Его можно немного доработать и мы получаем ПИД для задвижки с дискретными выходами.
ПИД для задвижки
Вставляем макрос в менеджере компонентов в разделе управляющие и регулирующие модули RegKZR.
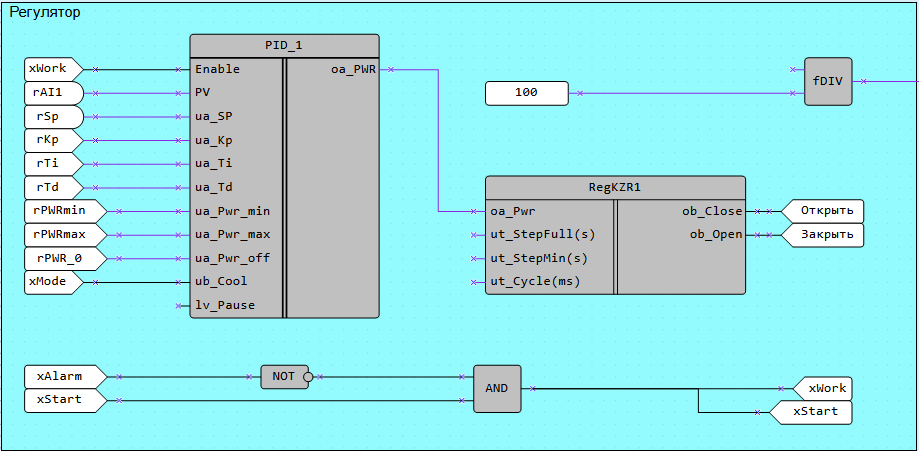
Его входные и выходные параметры:
Правильно указываем полный ход задвижки. Иначе будет недорегулирование или перерегулирование. Можно потерять точность.
С уважением, Гридин Семен