Многочисленные дискуссии на тему применимости преобразований Лоренца в физике сподвигли меня еще раз рассмотреть движение тела в разных инерциальных системах отсчета с применением преобразований Лоренца. Здесь такая задача рассмотрена только для скоростей, да и сильно нагружена формулами. Теперь попробуем построить графики для скоростей, времени и мест в gnuplot.

Для начала определим необходимые константы и функции из специальной теории относительности:
- c=299792458 (м/с)
- vsum(x,y)=(x+y)/(1+x*y/(c*c))
- trel(t,x,v)=(t-v*x/(c*c))/sqrt(1-v*v/(c*c))
- xrel(t,x,v)=(x-v*t)/sqrt(1-v*v/(c*c))
Пусть система отсчета A движется относительно нас (а наша система пусть обозначается буквой O) равномерно и прямолинейно со скоростью VA=0.8c (80% от скорости света в вакууме). Пусть также система B движется равномерно и прямолинейно со скоростью VB=0.8c, но относительно системы отсчета A. Так можно вычислить скорость системы B относительно нас:
- VB0=vsum(VA,VB)
- print(VB0)
Вычисления показали, что VB0=292480446.829268, что примерно составляет 0.9756c (97.56% от скорости света). В условиях этой задачи величина VB0, также как и величины VA и VB, является константой.
Рассмотрим теперь движение некоторого тела длиной l = 299792458 метров в системе B. Это тело движется в направлении своего размера l, скорость его центра масс в системе B изменяется по закону v(t)=c/(1+exp(10-t)) и проиллюстрирована на рисунке 1.
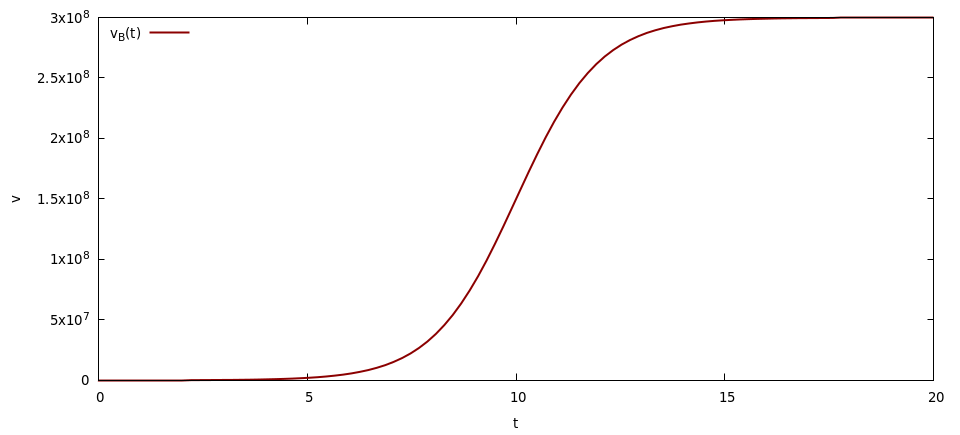
Время, отложенное по горизонтальной оси на рисунка 1 и 2, относится к системе отсчета B.
На рисунке 2 повторяется то, что было сделано в статье "Дважды относительное движение" (там математика, здесь просто иллюстрация). Скорости в разных системах отсчета тем больше различаются, чем меньше исходная скорость тела в системе отсчета B. Время, отложенное по горизонтальной оси на рисунке 2, может относиться как к системе отсчета B, так и к любой другой инерциальной системе отсчета. Преобразования для скорости не зависят от времени в системе наблюдателя. Опишем уравнение для координаты x(t)=c*log(e^10 + e^t)-10*c, взяв интеграл от скорости v(t)=c/(1+exp(10-t)) и выбрав произвольную константу интегрирования равной -10*c, так, чтобы рассматриваемое движение начиналось в нуле координат в первой системе отсчета (рисунок 3).
Графики, изображенные на рисунках 3 (выше) и 4 (ниже), показывают, что координата и время также являются инвариантныи по отношению к выбору системы отсчета. Здесь стоит отметить, что, для перехода от системы отсчета B к A с последующим переходом от A к нашей системе отсчета, необходимо при первом переходе (от B к A) пересчитывать и координату, и время. Все дело в том, что преобразования для времени и координаты зависят одновременно от времени и координаты в оригинальной системе отсчета. На графиках на рисунках 3 и 4 приведено сравнение для наблюдаемых в системе отсчета O положений и времени (голубая линия) и для пересчитанных через систему отсчета A положений и времени (желтая линия).
Здесь перечислены функции для gnuplot, по которым строились графики:
- trel(t,x,v)=(t-v*x/(c*c))/sqrt(1-v*v/(c*c))
- xrel(t,x,v)=(x-v*t)/sqrt(1-v*v/(c*c))
- x(t)=c*log(exp(10) + exp(t))-10*c
- tA(t)=trel(t,x(t),VB)
- xA(t)=xrel(t,x(t),VB)
- tO(t)=trel(t,x(t),VB0)
- xO(t)=xrel(t,x(t),VB0)
- tO2(t)=trel(tA(t),xA(t),VA)
- xO2(t)=xrel(tA(t),xA(t),VA)
Дополним эти функции уравнениями для координат и времени для концов рассматриваемого тела:
- xl(t)=c*log(exp(10) + exp(t))-10*c-4*c
- tlA(t)=trel(t,xl(t),VB)
- xlA(t)=xrel(t,xl(t),VB)
- tlO(t)=trel(t,xl(t),VB0)
- xlO(t)=xrel(t,xl(t),VB0)
- tlO2(t)=trel(tlA(t),xlA(t),VA)
- xlO2(t)=xrel(tlA(t),xlA(t),VA)
- xr(t)=c*log(exp(10) + exp(t))-10*c+4*c
- trA(t)=trel(t,xr(t),VB)
- xrA(t)=xrel(t,xr(t),VB)
- trO(t)=trel(t,xr(t),VB0)
- xrO(t)=xrel(t,xr(t),VB0)
- trO2(t)=trel(trA(t),xrA(t),VA)
- xrO2(t)=xrel(trA(t),xrA(t),VA)
На рисунке 5 изображены координаты центра и краев наблюдаемого тела в системе отсчета, связанно с нами. Видно, что разница между координатами в начале движения (когда скорость меньше) больше, чем впоследствии (происходит лоренцево сокращение длины). При этом вычисления, произведенные через систему отсчета A (точки на графике) и напрямую (линии на графике), совпали, что подтверждает корректность используемых преобразований.
Стоит еще раз отметить, что инвариантность скорости проще демонстрируется, поскольку в преобразовании скорости нет явной зависимости от времени. Преобразования для координат требуют также пересчета времени, от которого будет зависеть пересчитанная координата. Также и для пересчета времени требуется вычисление координат из-за их взаимной зависимости.
Надеюсь эта демонстрация была понятна, здесь нет сложных выкладок, только иллюстрации, демонстрирующие совпадение.
Подписывайтесь на мой канал и оставляйте комментарии!