Назначение приемника команд управления следует из его названия. Приемник, установленный на борту дрона, по радиоканалу получает сигналы управления с пульта. Далее эти команды поступают на полетный контроллер. Контроллер обрабатывает команды, и в зависимости от того какая команда была, выполняет действие. Например, отклоняет дрон вправо, увеличивает скорость вращения моторов и т. д.
На сегодняшний день активно используются две системы управления:
- ExpressLRS (ERLS)
- TBS CROSSFIRE
Еще используется система FrSky, но она устанавливается всё реже.
Плюсы системы от TBS заключаются в чёткой отлаженной работе и простоте сопряжения приемника с передатчиком. Минусы это единственный производитель TBS и цена.
Система ERLS имеет открытый исходный код, поэтому производить приемники и передатчики может любая компания. Ещё плюсы ERLS - это цена и активное развитие этого протокола. Минус- это более сложное сопряжение передатчика с приемником.
Будем использовать на дроне приемник JHEMCU ELRS RX24T 2.4G.
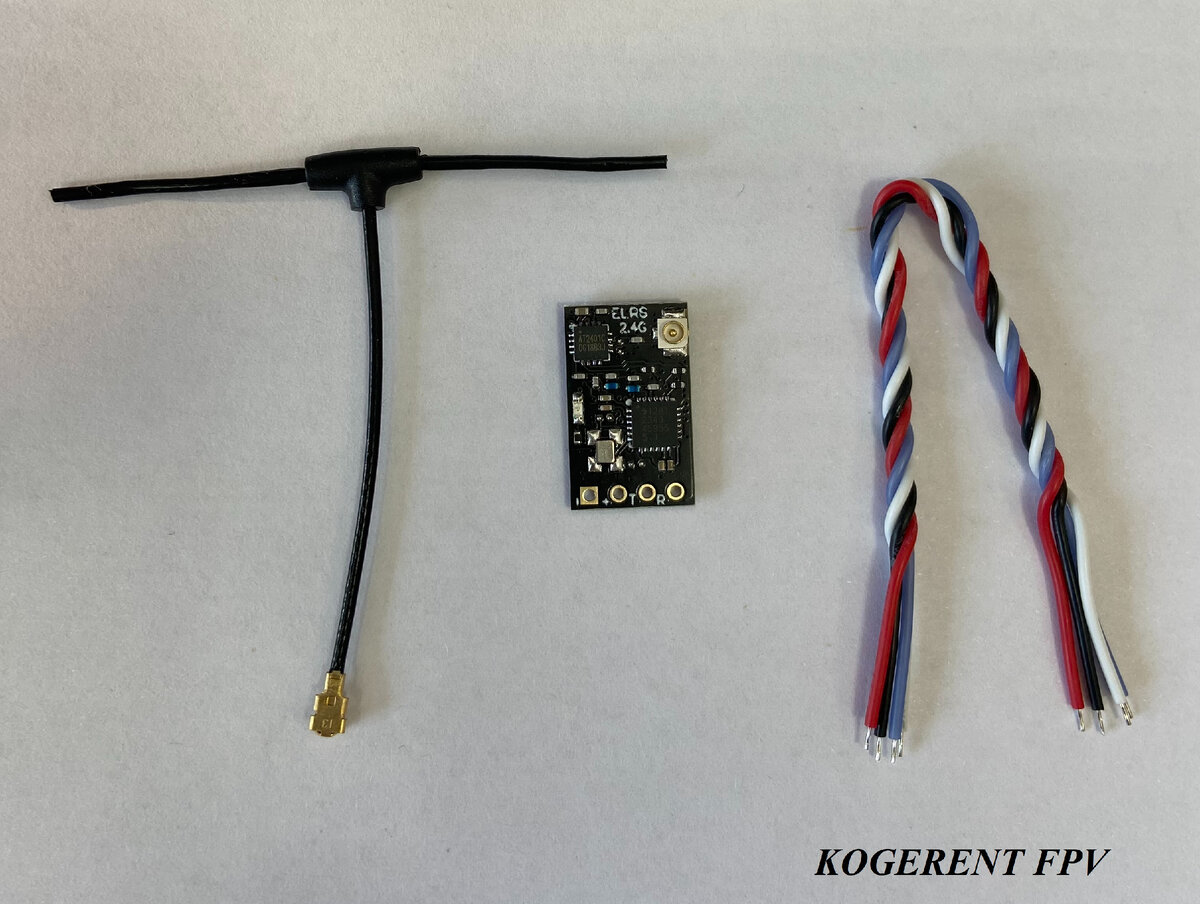
Комплект поставки:
- Приемник JHEMCU ELRS RX24T 2.4G - 1 шт.
- Т-образная антенна - 1 шт.
- Провод силиконовый - 4 шт.
Немного характеристик приемника:
- Габаритные размеры 18х11х3 мм
- Центральная частота 2400 МГц
- Напряжение питания 5 Вольт
- Микроконтроллер ESP8285
- Микросхема радиомодуля SX1280IMLTRT
- Поддержка перепрошивки по Wi-Fi
Дальше вдаваться в его характеристики и способы прошивки не будем, это тема отдельной статьи. Перейдем к установке на дрон.
Установка и крепление
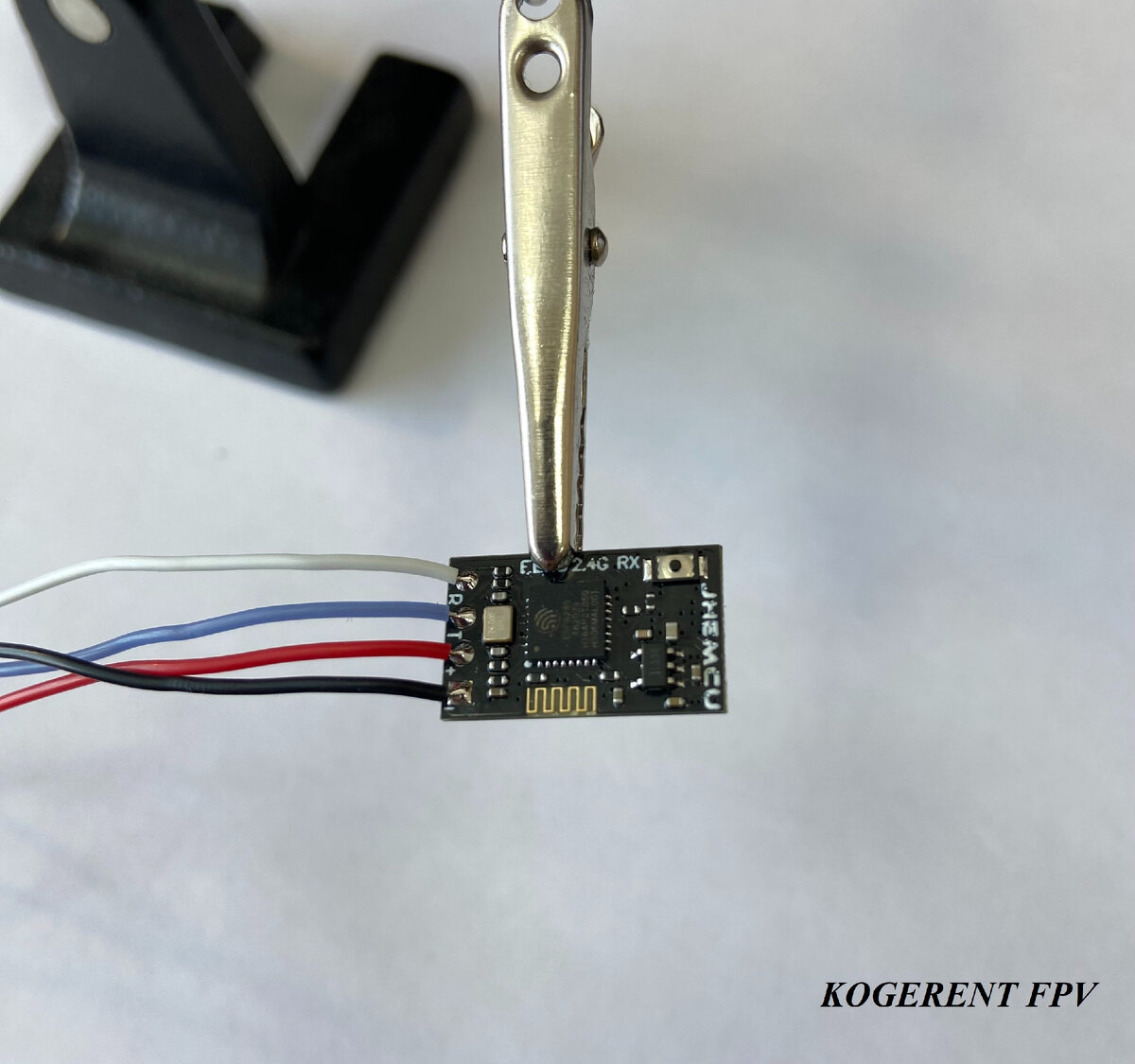
Первым делом припаиваем провода.
Красный "+" Черный "-" Белый "RX" Синий "TX"
Теперь подумаем, как будет крепиться антенна. Есть вариант закрепить на луче рамы, но мы сделаем по-другому. В FPV-хобби сложно обойтись без 3D-печати. Печатные элементы помогают надежно и аккуратно закрепить оборудование. На выбранную раму в интернете можно найти огромное количество готовых деталей в 3D. Изготовим держатель для антенны приемника на 3D-принтере. Рисунок 3.
В последующем он будет служить и держателем антенны видео-передатчика (VTX). Ссылку на 3D-модель детали держателя антенн прикрепляю.
Антенна ERLS будет крепиться способом как показано на рисунке 4.
Далее устанавливаем на раму приемник и подключаем к нему антенну (разъем подключения IPEX 1). Рисунок 5.
Далее надеваем термоусадку на приемник, усаживаем и крепим кабельной стяжкой. Рисунок 6.
Подключение
Приемника закреплен, приступаем к его подключению. Выбранный приемник работает по протоколу CROSSFIRE (CRSF), поэтому требует подключения через UART-порт. Посмотрим на схему от производителя полетного контроллера, куда там рекомендуется подключать приемник команд управления. Рисунок 7.
Подключим наш приемник как рекомендует производитель полетного контроллера к UART3-порту (контактные площадки RX3, TX3). Питание возьмем 4.5 Вольта. Этого питания будет достаточно и оно появляется уже при подключении USB-кабеля, т.е приемник можно проверять и прошивать без подключения батареи. Землю возьмем ближайшую. Предварительно лудим контакты к которым собираемся припаивать приемник. Рисунок 8.
К этим площадкам припаиваем провода от приемника. Рисунок 9. Рекомендую не укорачивать провода из комплекта, лучше использовать всю длину, а излишки уложить. Если потребуется что-то переставить, поднять или сместить, то длина проводов позволит вам это сделать.
Красный и черный провода вопросов вызвать не должны, это полюс и минус питания. А вот белый провод RX от приемника ERLS подключаем к площадке TX3 полётного контроллера. Синий провод TX от приемника ERLS подключаем к площадке RX3 полётного контроллера. Приведу для понимания схему подключения для протокола UART. Рисунок 10
Приемник установлен и подключен. На данном этапе наш дрон выглядит так:
На этом этапе, если произвести настройку приемника в betaflight и «подружить» приемник с пультом, можно совершить полёт в режиме прямой видимости (без FPV-системы).
Подписывайте.
В следующей статье установим и подключим видеопередатчик (VTX) Eachine TX805.