Полётный контроллер (далее ПК) - это устройство управления беспилотным летательным аппаратом. Будем устанавливать полетный контроллер от производителя JHEMCU модель GF30F405-ICM и на его примере знакомится с функционалом полетных контроллеров. В независимости от производителя, полетные контроллеры выполняют одинаковые функции и имеют схожее строение.
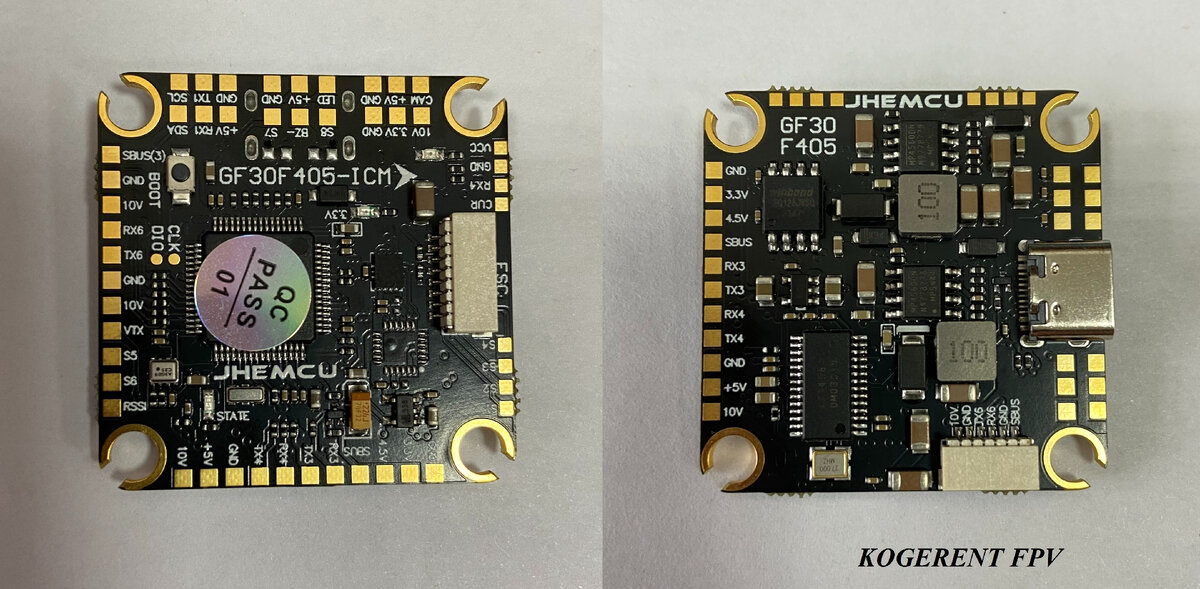
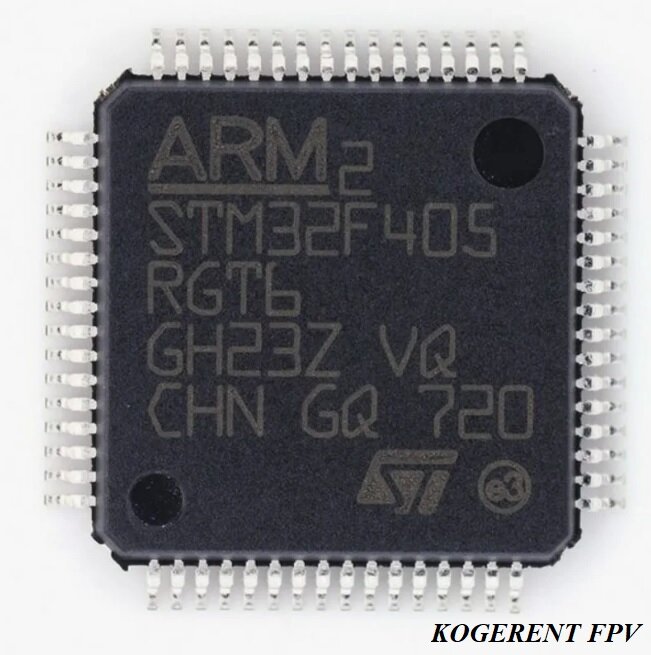
"Сердце" полетного контроллера и можно сказать всего БПЛА - это микроконтроллер. Практические все производители устанавливают в свои ПК микроконтроллеры фирмы STMicroelectronics. Микроконтроллеры бывают разных серий: F411, F405, F722, F453, F765, H743. Здесь оны расположены в порядки увеличения производительности. Справа налево увеличивается тактовая частота, версия ядра, увеличивается количества подключаемых периферийных устройств. В выбранном ПК установлен микроконтроллер STM32F405RGT6. В названии полетного контроллера число 405 как раз и говорит о серии установленного микроконтроллера.
В микроконтроллер поступает информация от датчика гироскопа-акселерометра, от приемника команд управления, с GPS-приемника, информация телеметрии и т. д. В микроконтроллере происходит обработка поступающей информации и формируются сигналы управления моторами (через регулятор оборотов), происходит управление наложением информации OSD на видео и последующей выдачей её на видео-передатчик (VTX), управление возвращением по GPS в экстренном случае и т. д. Чтобы осуществлять всё выше описанное управление, в память контроллера зашита программа. В нашем микроконтроллере от производителя прошивка Betaflight. При желании можно перепрошить версию на более новую или вовсе заменить ее на iNav. Существует еще Ardupilot, но для нашего полетного контроллера она еще не написана.)
Теперь рассмотрим полетный контроллер в целом. Кроме микроконтроллера и обвязки из радиоэлементов, требующихся для его правильного функционирования, на плате полетного контроллера присутствую преобразователи напряжения. Называют их BEC (Battery Eliminator Circuit - дословно: цепь, исключающая батарею) они из входного напряжения батареи делают более низкое стабилизированное. Обычно их 2 на 10 Вольт (BEC 10V/2A) для подключения видеопередатчика и 5 Вольт (5V/3A) для подключения FPV камеры.
Еще из важного на полетном контроллере - это микросхема (MEMS-датчик) ICM-42688-P являющаяся 3-х осевым гироскопом/акселерометром. Благодаря ей дрон понимает как он ориентирован в пространстве в данный момент и в какую сторону движется. На некоторых полетных контроллерах используются аналоги этой микросхемы с маркировкой MPU6000 или BMI270. Последняя установлена на популярном сейчас полетном контроллере SpeedyBee F405 V3.
Ну и последнее на чем остановимся - это микросхема OSD AT7456E. OSD значит On Screen Display — т.е. дисплей на экране или меню на экране. В этой микросхеме на видео-сигнал накладывается информация, которую вы посчитаете необходимой, контролировать во время полета. Например, потребляемый ток, напряжение аккумулятора.
Обмен информацией между полетным контроллером и подключаемыми устройствами в основном происходит по цифровому последовательному интерфейсу UART. Иногда для подключения GPS-приемника задействуется I2C-интерфейс.
Думаю теории достаточно, переходим к установке полетного контроллера на дрон.
В комплект входит:
- Полетный контроллер JHEMCU GF30F405-ICM - 1 шт.
- Силиконовые втулки-амортизаторы - 4 шт.
- Шлей для подключения к регулятору оборотов - 1 шт.
Подключаем шлейф к регулятору оборотов. Рисунок 6.
Устанавливаем силиконовые втулки-амортизаторы в отверстия полетного контроллера и подключаем к нему шлейф от регулятора. Устанавливаем стек на место и крепим сверху гайками М3 рисунок 7. Гайки придется приобрести, т. к . в комплекте ни с рамой ни с полетным контроллером их не было.
На этом всё. Статья получилась наполненная информацией, поэтому подключение к Betaflight configurator выполним в следующей статье. На моторах, направление вращения которых не соответствует схеме конфигуратора (рисунок 8), через программу BLHeliSuite изменим на противоположенное.