С развитием силовой электроники всё чаще в технике предпочтение отдают бесколлекторным моторам. Они имеют много преимуществ перед коллекторными (щёточными). Минусом бесколлекторных моторов считалось сложное управление, но с появлением транзисторов способных пропускать большие токи и высокочастотных микросхем управления этот их минус ушёл.
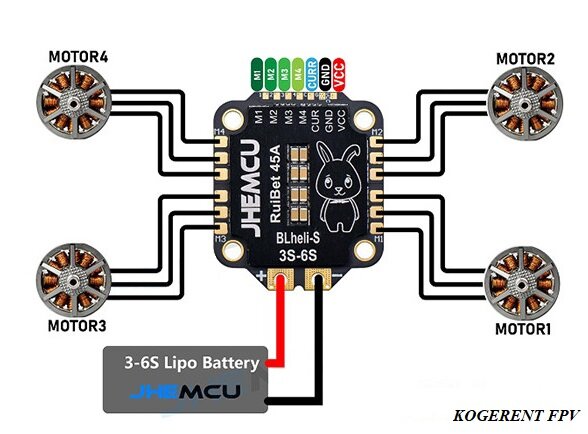
В нашей сборке используются как раз бесколлекторные моторы, а управлять ими будем четырех канальным регулятором JHEMCU RuiBet 45A 4in1 3-6S
- 45A в названии означает, что максимальный ток на каждый канал 45 Ампер.
- 4in1 показывает, что регулятор четырехканальный и может управлять сразу четырьмя моторами.
- 3-6S показывает диапазон напряжений, которое регулятор может коммутировать на обмотки статора.
От производителя имеем комплектацию. Рисунок 3.
Что в комплекте:
- Плата регулятора оборотов - 1 шт.
- Шлей подключения регулятора оборотов к полетному контроллеру (FC) - 1 шт.
- Плата с защитными диодами (супрессорами) - 1 шт.
- Электролитический конденсатор 1000 мкФ 35 В - 1 шт.
- Разъем XT-60-M c колпачком - 1 шт.
- Силиконовые втулки-амортизаторы - 4 шт.
- Провода 14AWG красный- 1 шт, черный -1 шт.
Думаю многим будет интересно назначение электролитического конденсатора и платы с защитными диодами из комлекта.
Электролитический конденсатор большой емкости служит для накопления энергии. В момент резкого ускорения требуется большой ток, основная часть этого тока идет с аккумулятора, а часть тока отдает накопивший в себе конденсатор. Из-за этого не происходит сильного проседания напряжения на батарее в момент резкого ускорения. Так же конденсатор выполняет функцию фильтра высокочастотных составляющих напряжения питания.
Защитные диоды (супрессоры) нужны для подавления скачков напряжения и наводок при резком изменении скорости вращения моторов дрона.
Можно собрать схему и без описанной выше защиты и она будет работать, но это скажется на сроке службы аккумуляторов и самой платы регулятора оборотов.
Для работы нам потребуется:
- Припой
- Пинцет
- Канцелярский нож
- Флюс
- Кусачки
- Паяльник или паяльная станция
Начинаем с того, что устанавливаем силиконовые втулки-амортизаторы и примеряем плату регулятора на раме. Рисунок 5.
Провода от моторов будет заводить с внешней стороны. Примеряем провода 1-го мотора (на плате указано M1 место подключения) и отрезаем нужной длины. Далее берем канцелярский нож и зачищаем провода примерно на 4 мм. И теперь самое интересное лудим провода и контактную площадку на плате и припаиваем по очереди 3 провода от 1-го мотора. Рисунок 6.
Рекомендации по пайке. Рекомендую использовать жало на паяльнике большого размера и выставить высокую температуру пайки. Плата регулятора довольно толстая, плюс на ней расположена металлическая пластина выполняющая роль радиатора. Это всё имеет большую теплоемкость. Поэтому, чтобы не было эффекта "холодной пайки" требуется соответствующая температура. Проводам моторов не страшна высокая температура, они силиконовой изоляции и не оплавятся.
Повторяем те же действия с проводами от 2-го, 3-го и 4-го моторов. Результат на рисунке 7.
Готовим электролитический конденсатор к установке, формуем выводы под установку в отверстия на плате регулятора. Отверстия маленького диаметра в уголка контактных площадок "+" и "-". Рисунок 8.
Далее устанавливаем сверху на конденсатор плату с защитными диодами. После одеваем на сборку термоусадку диаметром 15 мм и усаживаем. Рисунок 9.
Паяем сборку из электролитического конденсатора и платы с защитными диодами на плату регулятора. Рисунок 10.
Берем из комплекта красный и черный провод 14AWG, берем разъем XT-60-M и припаиваем провода к разъему. После надеваем защитный колпачок на разъем. Рисунок 11.
И последняя операция. Припаиваем провода питания к плате регулятора оборотов. Рекомендации по пайке аналогичны с пайкой проводов двигателей. Смотрим что получилось на рисунке 12 и 13.
Теперь для проверки можно подключить питание от 12.6 В до 25.2 В. Первое подключение желательно делать от источника питания, для того чтобы контролировать ток потребления. Если есть ошибка в пайке и имеется короткое замыкание ток резко вырастет и нужно успеть отключить питание до того как что-то сгорит)
Дрон я подключил к питанию, он пискнул моторчиками. В этот момент регулятор определяем начальное положение моторов и переходит в режим ожидания. Дальнейшее управление возможно только через полетный контроллер.
Подписывайтесь.
В следующей статье установим полетный контроллер JHEMCU GF30F405-ICM и повращаем моторы через betaflight-конфигуратор.