Toyota представляет Punyo, мягкого робота, предназначенного для обнимашек
Компания Toyota представила Punyo, уникального человекоподобного робота, который значительно отличается от традиционного дизайна. В основе разработки Punyo лежит наблюдение, что люди часто используют не только руки для переноски громоздких предметов, но и грудь, бедра и руки для дополнительной опоры. Это понимание привело к созданию робота, который использует более человеческий подход к переноске предметов.
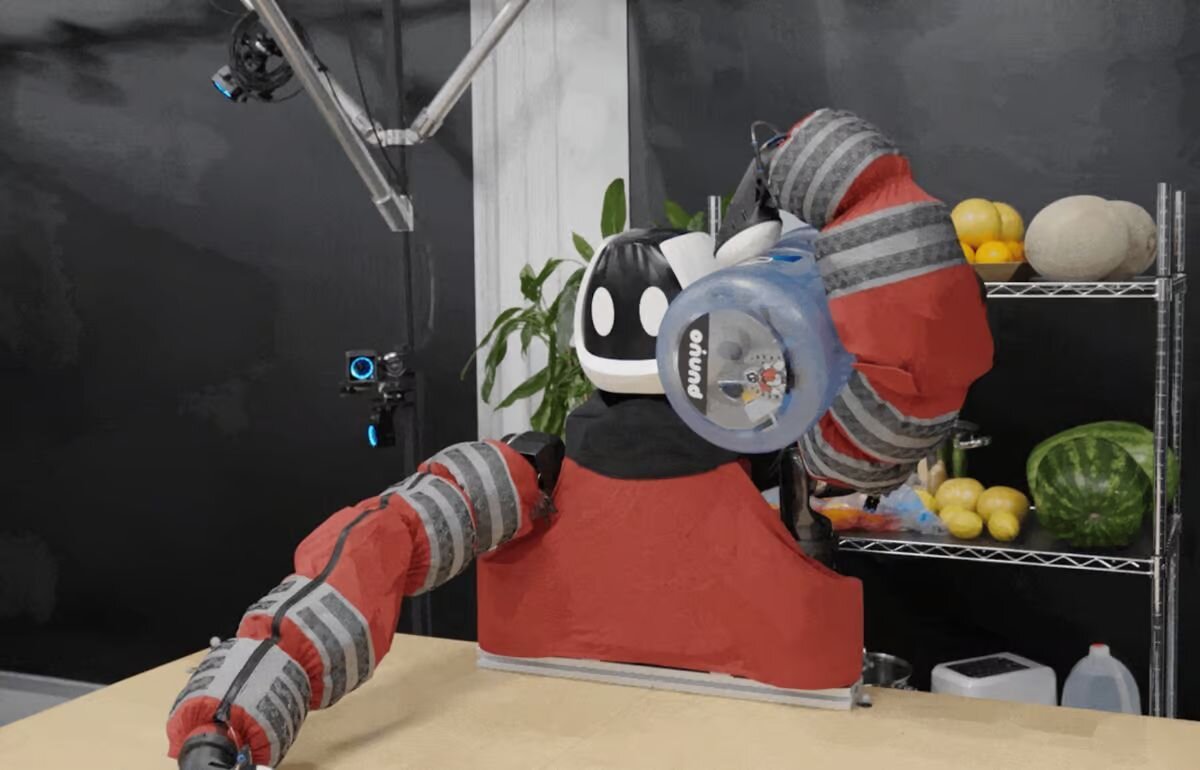
Punyo напоминает любимого персонажа Baymax из диснеевского фильма «Большой герой 6« своим милым, доступным лицом и мягким, приятным внешним видом. Это еще больше подчеркивает облицовка, которая выглядит как уютный свитер.
Свитер не просто элемент дизайна Punyo, он сделан из приятных на ощупь материалов, которые покрывают жесткий металлический скелет робота. Этот слой не только упругий и податливый, но и оснащен тактильными датчиками, которые позволяют Punyo чувствовать характер объятий, будь то человек или предмет, который он несет. Эта особенность подчеркивает, что робот ориентирован на то, чтобы обнимать и бережно обращаться с предметами.
По словам представителей Toyota, вместо обычных рук Punyo оснащен надувными лапами. Эти лапы представляют собой деформируемые надувные подушечки, украшенные изнутри точечными узорами. Камеры следят за этими узорами, позволяя роботу распознавать контакт с объектом по деформации точек.
Руки робота отличаются дополнительной мягкостью: они состоят из 13 наполненных воздухом пузырьков, которые тянутся от плеча до запястья. Давление в этих пузырьках регулируется индивидуально, что позволяет регулировать жесткость и оптимизировать работу робота в зависимости от поставленной задачи.
Возможности робота варьируются от прижимания предметов к груди для подъема до использования более сложных техник переноски, таких как перекидывание кувшина с водой через плечо.
В процессе обучения Punyo задействован искусственный интеллект: робототехники могут настраивать переменные, связанные с имитацией движений, и определять приоритетность таких факторов, как скорость, эффективность или точность.
Для чего нужны роботы: