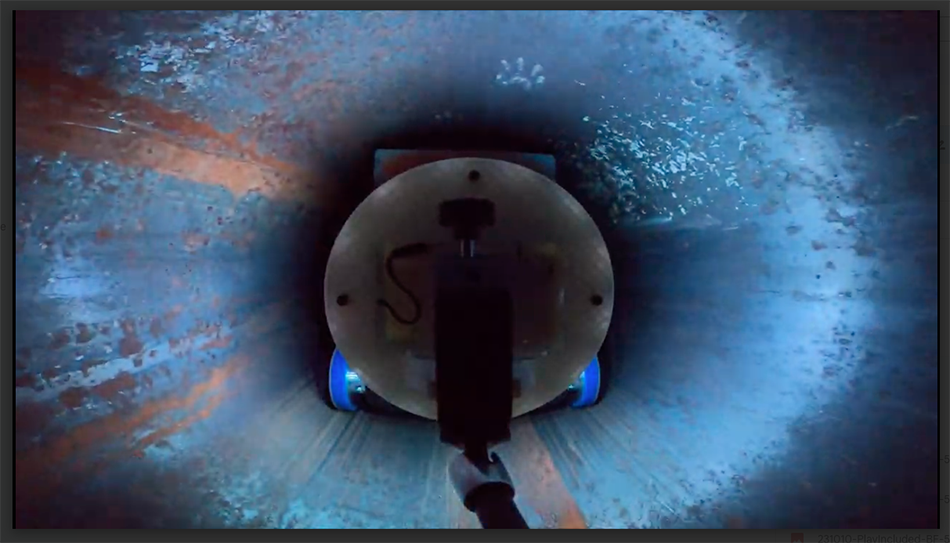
Ученые из университета Карнеги-Меллона находятся в процессе разработки модульного робота для проверки и ремонта подземных газопроводов. Робот оборудован уникальным мобильным модулем, способным передвигаться по трубопроводу внутри благодаря трём моторизованным колесам. Это позволяет упростить ремонт.
Основной модуль робота включает в себя батарейный модуль, картографический модуль с оптическим сенсором высокого разрешения и лазером для создания 3D-изображения внутренней поверхности трубы, а также модуль ремонта.
В настоящее время последний модуль представляет собой вращающийся элемент, наносящий непрерывный слой быстроотверждающейся герметизирующей смолы на поверхность трубы. Команда на поверхности выявляет проблемы с помощью картографического модуля и системы искусственного интеллекта для анализа изображений.
Робот способен проверить около 14,5 км трубы диаметром 305 мм за восемь часов или покрыть герметиком приблизительно 3 км за то же время. Энергоснабжение робота осуществляется по кабелю длиной 61 м, но ученые планируют увеличить этот показатель до 2 км.