Всем привет! Наделал я гусеничных платформ, управлений со смартфона и вот этого всего, но нужно начать про управление с начала.
Предисловие.
Люблю я мастерить всякое ненужное и некрасивое. Чтобы ещё и времени много занимало. Веселое это дело! И вот сейчас взбрело в мою седеющую лет с двадцати голову, что нужно воплотить мечту детства! Сделать пультик к танку на проводочке. А то Серега сосед в детстве бегал с таким. Пульт в руках, бежит, танк уже давно разбитый за провод тащится и по земле грохочет! Красота! Да и вырос Серега хорошим и успешным человеком. Наверняка всё благодаря танку! Нужно это срочно исправить!
Реализация.
В одной из предыдущих статей была гиф анимация о том, с какой скоростью едет моя платформа. И это очень медленно. Отталкиваясь от этого распишу некоторые требования к управлению:
- Количество проводов в проводе управления - 4. Будем передавать по ним питание для каждого мотора.
- Длина провода - 1,5м. Вполне хватит мееедленно ходить рядом, не вытягивая не удобно руки.
- Коммутация без ШИМ просто тумблерами на 3 положения. Со скоростью передвижения моей платформы регулировка будет не заметна, а корректировать перекос буду рулением.
- Пульт должен быть хоть как-то удобно эксплуатируемым, а не просто прямоугольник. Хотя можно и его.
- Аккумуляторы должны быть в пульте. Опять же для простоты коммутации.
Вот вроде как и всё. Начнем с моделирования пульта.
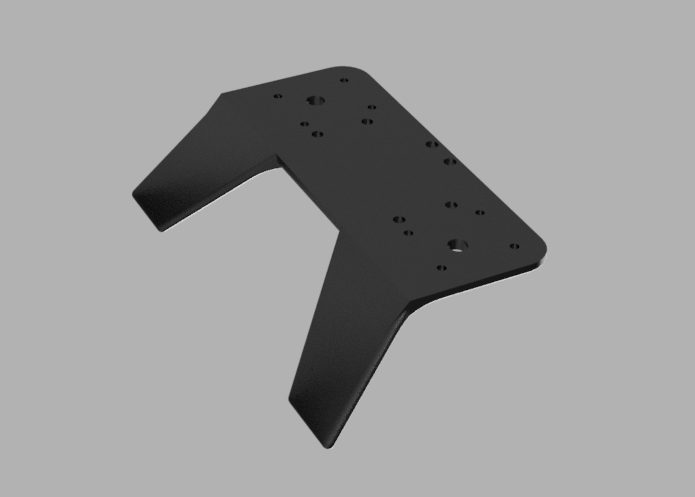
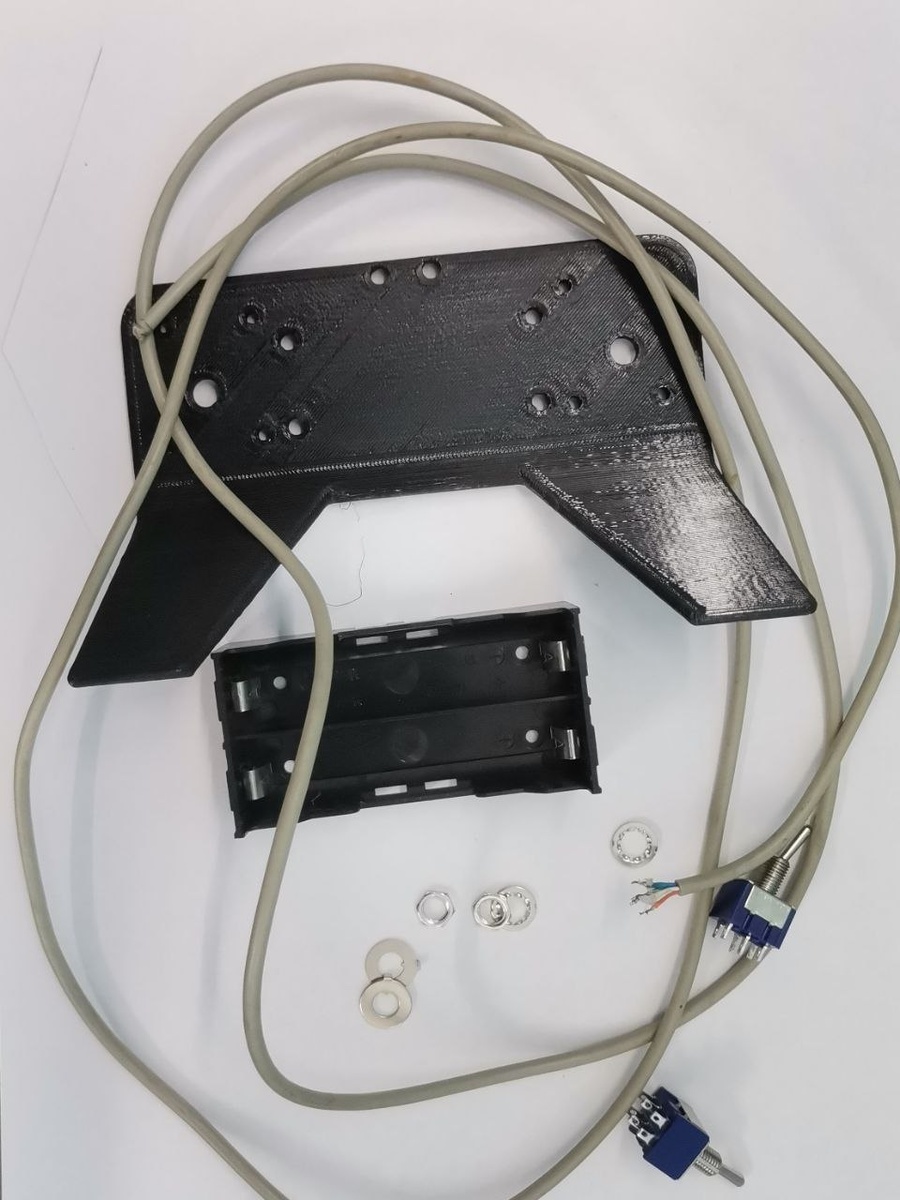
Сделал место под тумблеры, крепление для батарейки и под джойстики на будущее. Так же добавил более удобные рога, уши, ноги, хваталки... штуки для того, чтобы удобно было держать. Сами тумблеры купил в радиотоваров, проводок взял от старого USB шнурка. Там как раз 4 провода.
Ну или почти всё. Нужна ещё схема! Схему переполюсовки, используя тумблер на три положения с двумя группами контактов нагуглить совсем не сложно, но нарисую я ее сам, чтобы иметь меньше шансов на ошибку. Замкнуть высокотоковый аккумулятор -такое себе развлечение.
Открываю любимый KiCad, ищу из стандартной базы что-то похожее и соединяю.
Схема очень простая. Контакт на мотор просто переключается между выводами батареи, а при среднем положении тумблера не подключен никуда.
Проверяем!
Получилось хоть и медленно, но весело. И анимацию из видео я сделал в самописной программе из прошлой статьи.
Всем спасибо за просмотр! Следующим шагом для этой малюсенькой платформы будет замена проводного управления на беспроводное. Можно развести не сложную плату или сделать всё на готовых модулях. Должно быть интересно! Если у кого-то есть вопросы, идеи или предложения, добро пожаловать в комментарии под видео. До свидания!