Всем привет! Нужно все доделать. Ну хоть до девятого мая, что ли...
Предисловие.
FreeCAD знатно попил моей кровушки. Все время, которое я мог потратить на лежание на диване в выходной доработку софта, электроники и добавления нового функционала, я потратил на перемещение отверстия под ведомое колесо. Нервные клетки покинули мастерскую на пару часов раньше меня и очередная примерка импровизированной гусеницы из замкнутого ремня 2gt с отрицательным результатом не вызвала во мне особых эмоций. Я просто собрал манатки и ушёл домой вслед за нервами, ну и носки примерить. Они же не как гусеницы, они подойдут - их же жена подарила.
Спустя несколько дней я, все же, установил хоббийную версию Fusion 360 и тут Остапа понесло...
Новая концепция.
Ремень мне категорически не нравился, а опыта в проектировании траков и вот этого вот всего особо не было. Использовать готовый вариант и писать о нем - не интересно, и я решил сделать так:
- Спроектирую так, как это понимаю концептуально,
- Испытаю,
- Посмотрю как было нужно.
Надёжный план. Не подкопаться.
Нарисовал ведущее колесо. Обвел эквидистантой в 0,2мм. Отделил один сегмент и оформил все это в трак.


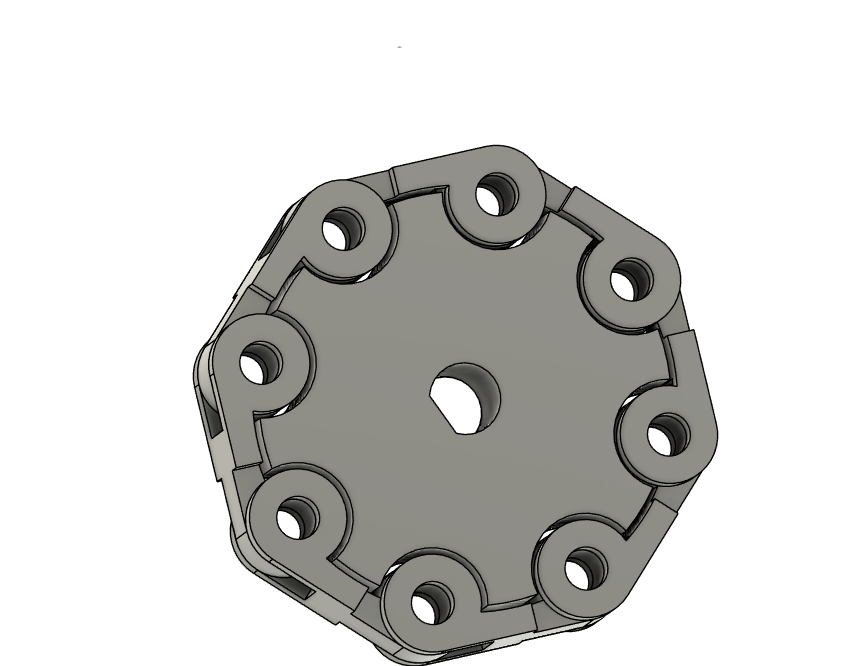
Напечатал колесо и несколько штук - что-то не то.
Добавил "мяска". Сделал так, чтобы ведущее колесо было внутри, усилил.

Уже лучше!
Но тут вспомнил, что есть же у меня tpu пластик для принтера! Я же могу сделать траки с резиновой подошвой(как бы это не называлось)! Ещё немного переделал.
Распечатал некоторое количество. Рассверлил отверстия под оси из кусочков пластика. И собрал сегмент.
Воот! Другое дело!
Теперь стоит заменить старые рессоры из канцелярской резинки на напечатанные из tpu.
Верхний вариант работал значительно лучше. Пришло время напечатать кусочек корпуса и примерить всё.
Из минусов - слишком много степеней свободы у рессор. Решил пофиксить это костылем - соединю оси левой и правой стороны попарно.
Всё напечатал, собрал и для тестов добавил только питание.
Проверяем!
Осталось прикрутить макет платы управления, прошить, собрать приложение под андроид и протестировать как там чего.
Но есть одно небольшое но...
Автор статьи делает танк!
Тем ввременем заказчики:*
Планов, конечно, громадье. Хочется попробовать приделать датчиков, добавить платформе автономности, компенсировать по данным телеметрии проскальзывание гусениц, создать карту "сцепления" с полом. Да вообще возможностей научиться чему-то новому в робототехнике - море! Я уже начал прикидывать, что может пригодиться для всего этого.
Хорошей идеей было бы использовать одноплатный компьютер. Тут и open cv можно без проблем использовать и нормальные алгоритмы SLAM - прямо на борту. И даже плата подходящих габаритов есть у меня!
Минус, конечно, в отсутствии gpio. Но можно и какую-ниб blupill к ней подсоединить по нативному usb!
Или, как я, который не ищет лёгких путей и считает, что заканчивать пет проекты - дело недостойное, начать разводить свою плату.
Тут накидал все, что есть из микроконтроллеров - STM32F407VET6 и esp32. Будут общаться по SPI и собирать телеметрию. Нужно сделать драйвер для моторов посерьёзнее, обратную связь с моторами и все такое. Но это когда-нибудь потом. Если интерес не угаснет или кто-то заинтересуется кроме меня.
Всем спасибо за просмотр! Как обычно буду рад комментариям и до новых встреч!
P. S. К этой платформе уже можно приделать пульт "советских времен" на двух тумблерах на 3 положения и ходить за "танком" с проводом, радуюсь при этом жизни! Если кому-то нужны файлы для печати - могу поделиться в чате.