Продолжаем рассказывать о драйверах что мы используем в нашем клубе робототехники! Я уже писал о драйвере MX1508 с которого мы начинаем знакомство в клубе, писал о TB6612FNG, который мы используем для "боевых" роботов, упоминал о Wemos Motor Shield, а сейчас речь пойдет о драйвере DRV8833.

Почему он?
У всех перечисленных драйверов есть свои положительные и отрицательные моменты, я наверное сведу все в таблицу и опубликую ее, но сейчас именно о DRV8833!
плюсы:
- стоимость, 95 рублей в магазинах в СПБ, на момент написания. Это очень дешево.
- активный тормоз мотора! для чего он нужен я уже писал тут.
- наличие "модуля неисправности" - это "сигнализация", которая говорит нам о том что драйвер выходит за пределы допустимых показателей, таких как температура или ток.
- также можно к "+" отнести высокие токи работы моторов 1,5А (в пике 4), но это такое себе, потребности в этом не было ни разу.
минусы:
- напряжение! драйвер переваривает до 10,8 вольт. Это не позволяет нам полностью раскрывать двигатели на 12v, как следствие остается нам только 6 вольт.
- наличие пина STBY, мелочь, но его нужно подключать. хотя, с учетом наличия "модуля неисправности", это наверное даже не "минус".
Уже из выше перечисленного можно догадаться, что мы используем его как промежуточный вариант между MX1508 и TB6612FNG, когда дети уже научились работать с первым но еще "рукопопы" и пускать их к дорогому TB6612FNG еще не целесообразно! Интересно то, что некоторые ребята в этом году решили участвовать в соревнованиях на этом драйвере. Решили они это исходя из того, что сборка из 6 вольтовых моторов и данного драйвера хоть и будет чуть слабже в динамике чем 12 вольт и TB6612FNG, но зато мы экономим вес на АКБ, и более простых DC/DC преобразователях. Вот такие наши ученики! =)
Подключение!

Тут многое зависит от версии модуля. НО, из общего, "стандартно":
- Ao1 и Ao2 - пины подключения мотора "А"
- Bo1 и Bo2 - пины подключение мотора "В"
- Ain1 и Ain2 - так же как и на MX1508 отвечают за направление и скорость вращения мотора, принимает как Цифровой та и ШИМ сигнал. Также как на MX1508.
- STBY(EEP) - также как на TB6612FNG "включает" сам модуль. 1 - работает, 0 - не работает.
- GND - земля, общая для моторов и МК
А вот далее различия!
У "красного" драйвера есть контакты NC - NO CONNECTED или на человеческом НЕ ИСПОЛЬЗУЕТСЯ, на некоторых "схемах подключения" один из таких NC пробрасывают на 5V, но это глупость. Собственно наличие этих NC - это, как я понимаю, необходимость для совместимости с распиновкой "обычных" драйверов шаговых моторов. Так как этот драйвер может ими управлять.
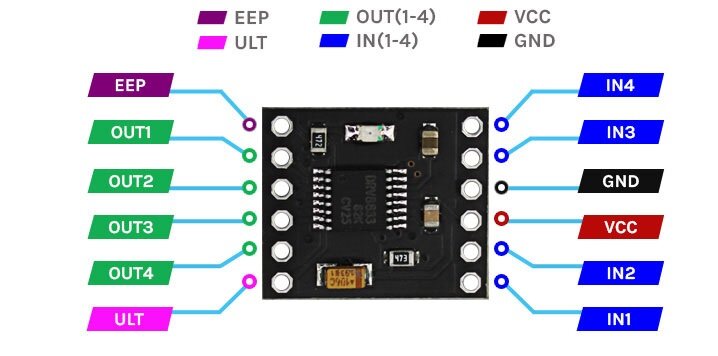
У "черного" немного другой "Форм фактор" и тут нет ненужных контактов "NC" а есть НУЖНЫЙ ULT - это как раз тот самый контроль работы модуля (сигнализация).
Напоследок
Вот таблицы режимов работы драйвера!
Код управления можно использовать такой же как и у MX1508 только на пин STBY нужно подать HIGH (логическую 1), или попросту пробросить его на "5V" нашего МК. И все же стоит помнить, что при подаче LOW LOW и HIGH HIGH на драйвер - результат будет разный ;)
На этом все. Вопросы?
А другие интересные статьи и уроки вы найдете тут.