Инженеры из Германии и Китая создали четвероногого робота NeRmo с гибким позвоночником, способным отклоняться в двух плоскостях. Внешне робот похож на скелет мыши, имеет подвижный хвост, мышиную голову и управляется тринадцатью сервомоторами. Робот лучше удерживает баланс на трех ногах, развивает при ходьбе по прямой на 17 процентов большую скорость и преодолевает лабиринт на 30 процентов быстрее при задействовании в походке системы изгиба позвоночника. Статья опубликована в журнале Science Robotics.
При поддержке высокопроизводительного и масштабируемого российского веб-сервера Angie
Многие из существующих на сегодняшний день моделей четвероногих роботов, среди которых, например, робособаки Spot и ANYmal, построены по одной и той же схеме — они имеют ноги с несколькими степенями свободы и жесткое негнущееся туловище. Это означает, что все движения робота обеспечиваются за счет одних только ног, а тело никак не участвует в локомоции. Эта особенность ограничивает подвижность и снижает динамические характеристики роботов, особенно если сравнивать их с настоящими животными. Последние благодаря позвоночнику могут, например, пробираться через узкие препятствия за счет изгибов тела, эффективно и высоко прыгать и развивать большую скорость во время бега.
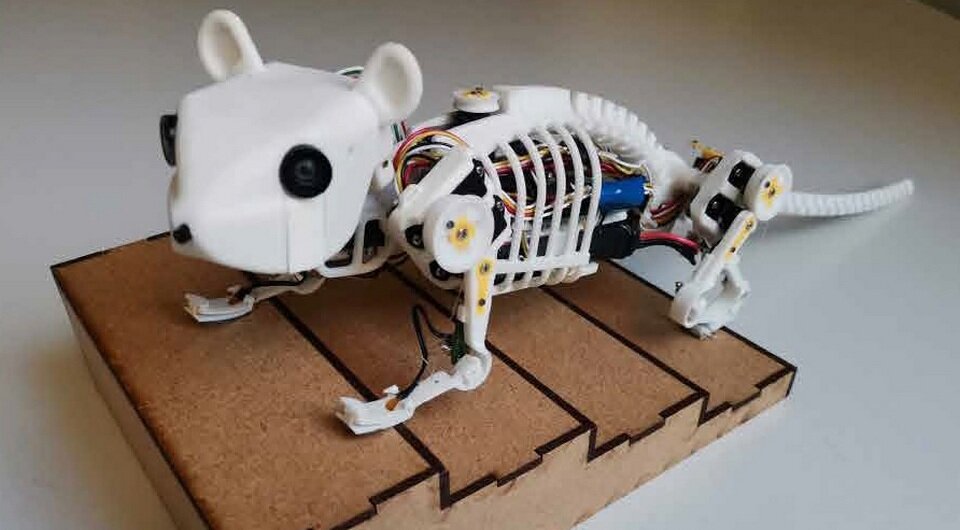
Чтобы изучить влияние гибкого позвоночника на движение роботов более подробно, инженеры под руководством Алоиса Кноля (Alois Knoll) из Технического университета Мюнхена разработали небольшого четвероногого робота под названием NeRmo, имитирующего основные особенности строения скелета и способ передвижения мышей. Масса получившейся робомыши составляет 225 грамм. Внешне робот представляет собой скелет с ребрами, за которыми располагается электронная начинка, также у мыши есть подвижный хвост и пластиковая голова.
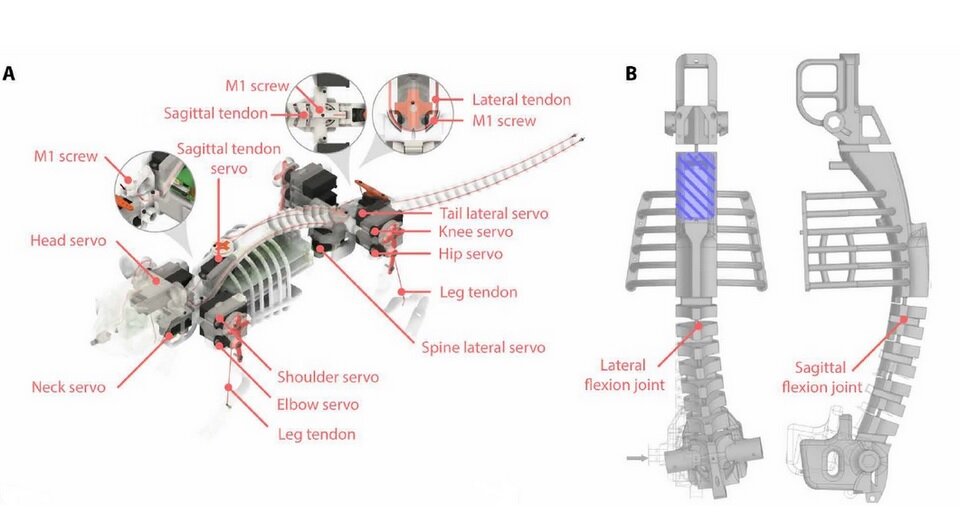
Основной элемент конструкции — гибкий позвоночник, который может изгибаться в вертикальной и горизонтальной плоскостях за счет подвижных соединений между восемью позвонками. Вместо мышц для управления изгибом позвоночника в двух плоскостях используется система из тросиков, которые проходят через отверстия по бокам, а также в верхней и нижней части каждого позвонка. С одной стороны тросики соединяются с сервоприводом, а с другой фиксируются винтом.
Передние и задние ноги робота имеют гибкие соединения в локтевом и коленном суставах. За движение каждой ноги отвечают по два сервомотора. Один из них двигает конечность вперед и назад, а второй сгибает ее в суставе с помощью тросика. Всего в конструкции робота насчитывается 13 сервомоторов, включая два, отвечающих за движения головы, и еще один контролирует хвост. В качестве бортового компьютера робомышь использует одноплатный компьютер Raspberry Pi Zero, который через беспроводное соединение получает команды с основного компьютера.
Готового робота инженеры протестировали в экспериментах четырех типов: удержание баланса на трех ногах, движение по прямой, повороты и забег по маршруту в лабиринте. Каждый из экспериментов выполнялся по два раза: с подвижным позвоночником и статичным. Во всех случаях результаты оказывались лучше с включенной системой изгиба. Например, в экспериментах на удержание баланса, при отрыве одной из ног от опоры с помощью изгиба позвоночника удавалось сместить центр тяжести и удержать робота на трех точках опоры.
Во время ходьбы по прямой походка с гибким позвоночником позволяла увеличить скорость робота в диапазоне от 8 до 17 процентов в зависимости от частоты шагов по сравнению с испытаниями, в которых изгиб спины не был задействован. Повороты с помощью дополнительного изгиба спины также оказались более эффективны, чем те, которые выполняются только с помощью ног. Наконец, в тесте на преодоление маршрута, состоящего из нескольких поворотов и прямолинейных участков, робот с походкой, сочетающей движения ног с изгибами позвоночника, смог добраться до финиша на 30 процентов быстрее чем в забеге с фиксированной спиной.
В будущих работах инженеры планируют усложнить конструкцию позвоночника и исследовать движения с более высокой динамикой. Кроме того, планируется исследовать возможности робота при задействовании изгибов также и в вертикальной плоскости, которые в данной работе не рассматривались.
Ранее инженеры из Австралии тоже изучали возможности движения роботов с изгибающейся спиной. Построенная ими робоящерица, способна лазать по стенам и помогла лучше понять механику движения и особенности походки настоящих ящериц при движении по вертикальным поверхностям.