Лида́р (транслитерация LIDAR или LiDAR — англ. Light Detection and Ranging «обнаружение и определение дальности с помощью света») — лазерный локатор, использующий технологию испускания лазером волн оптического диапазона с дальнейшей регистрацией лазерных импульсов, которые были рассеяны объектами: лазерную (или оптико-электронную) локацию. Лазерная локация использует методы обнаружения и определения угловых координат объектов аналогичные используемым в радиолокации, однако имеет большую разрешающую способность и точность. (Википедия)
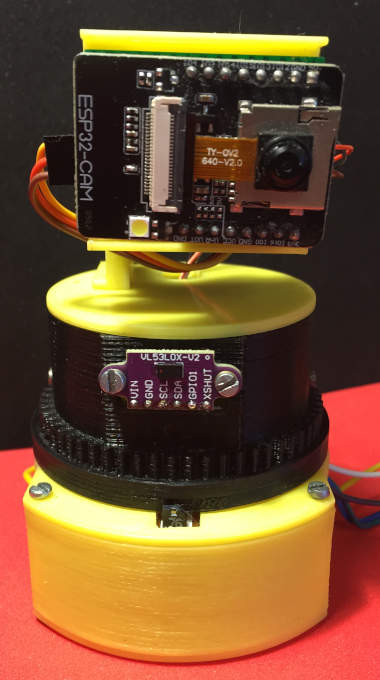
Устройство, изображенное на картинке, предназначено для измерения расстояния до ближайших объектов (предметов) по окружности от себя. В качестве датчика измерения расстояния используется лазерный дальномер на плате VL53L0X. VL53L0X – это миниатюрный высокоточный лазерный дальномер, обеспечивающий измерение расстояния до 2 м .На плате установлен миниатюрный лазер и фоточувствительная матрица диодов. Лазер короткими импульсами испускает свет, который отражаясь от препятствий попадает обратно и регистрируется на фоточувствительной матрице. Датчик измеряет время, за которое свет прошёл путь от излучателя до препятствия и обратно до датчика и на основе этого вычисляет расстояние до препятствия.
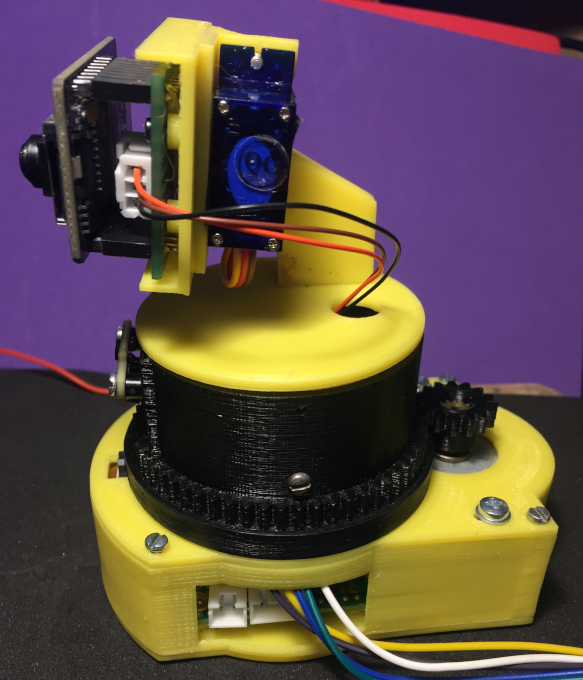
Конструктивно, лидар состоит из неподвижного корпуса и вращающейся "башни" с установленной на ней платой датчика VL53L0X. Вращение "башни" с датчиком осуществляется униполярным шаговым мотором через систему зубчатых шестерней - одной на валу шагового мотора с количеством зубьев равным 15 и шестерней на башне, с числом зубьев равным 60. Модуль у шестерен равен 1.
На "башне" так же установлен видеокамера, Esp32-cam, в качестве точки доступа, позволяющее транслировать видеоизображение по WiFi. Управление видеокамерой осуществляется:
- по горизонтали, вращением "башни" по окружности с шагом 1.875 градуса
- по вертикали, с помощью сервопривода с шагом 2 градуса.
Для освещения темных участков ландшафта, на корпусе камеры установлен сверх яркий светодиод в качестве фонаря.
Конструктивно, это весьма простое устройство. Конструкционные детали изготовлены на 3D принтере. Размеры устройства : - ширина 60мм, длинна 110 мм, высота 110 мм.
Все конструкционные детали сделаны из ABS филамента с параметрами:
Сопло - 0.4 мм
Толщина слоя - 0.2 мм
Заполнение - 100%
Поддержки - да
Температура: стол 105 град. С, сопло - 240 град.С
Устройство не автономное - подчиненное, получает команды по интерфейсам SPI и/или UART.
Внутри выглядит так:
Отвечу на все вопросы.
Спасибо.