В задачи динамического анализа и синтеза механизмов входят:
· установление режима работы механизма под действием внешних сил (окончательное установление требуемой мощности привода);
· обеспечение заданного режима работы механизма (определение колебаний угловой скорости входного звена с последующим устранением этих колебаний).
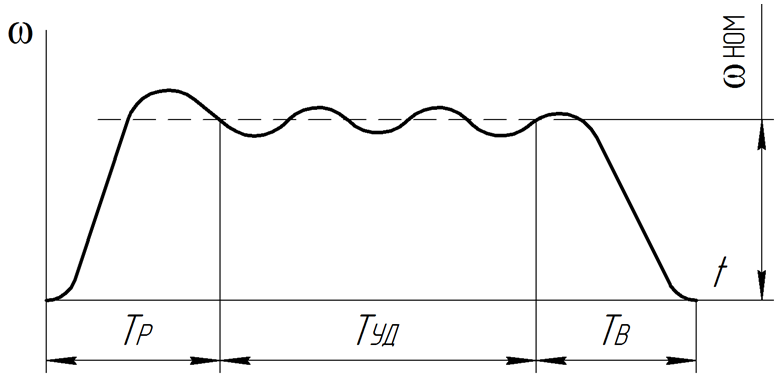
Для механизмов рабочих машин характерно наличие трех периодов его движения (рис. 5.1):
- разбег Tр;
- установившееся движение Tуд;
- выбег Тв.
В период разбега скорость входного звена ω возрастает от нулевого значения до некоторого среднего значения, соответствующего номинальному ωном. В период установившегося движения среднее значение скорости входного звена с учетом ее периодического колебания соответствует номинальному. В период выбега наблюдается снижение скорости входного звена от ее среднего значения до нулевого.
Колебание угловой скорости входного звена в период установившегося движения наиболее присуще механизмам с «мягкой» характеристикой двигателя (например, двигатель внутреннего сгорания). Для оценки влияния колебаний на работу механизма служит коэффициент неравномерности движения δ

где ωmax, ωmin и ωср – максимальная, минимальная и средняя угловая скорость входного звена в период установившегося движения; [δ] – допускаемое значение коэффициента неравномерности движения.
Для обеспечения условия (5.1) необходимо выполнить расчет момента инерции маховика (рис. 5.2), устанавливаемого на вал входного звена. Маховик представляет собой, как правило, диск, вращение которого обеспечивает выравнивание угловой скорости входного звена. С физической точки зрения маховик является аккумулятором кинетической энергии: забирает эту энергию у механизма при увеличении угловой скорости входного звена и отдает ее обратно при уменьшении угловой скорости входного звена. В двигателях внутреннего сгорания (рис. В1 из раздела 1) маховик обеспечивает вывод поршней из мертвых точек, которые соответствуют положениям ползуна 0 и 6 на рис. 4.1 из раздела 4.
Для ознакомления с методикой динамического анализа и синтеза будет рассмотрен следующий пример. На рис. 5.3 и 5.4 приведен кулисный механизм с пятью подвижными звеньями: 1 – кривошип; 2 – кулиса; 3 – камень кулисы; 4 – шатун; 5 – ползун. Структурный анализ такого механизма рассмотрен в разделе 2 на рис. 2.7.
Для динамического анализа следует выполнить план положений механизма по методике, описанной в разделе 3. После этого необходимо изобразить диаграмму Q(S) для определения силы полезного сопротивления, как было показано в разделе 4. Результаты построения приведены на рис. 5.3. Значения силы полезного сопротивления приведены в табл. 5.1.
Табл. 5.1. Значения силы полезного сопротивления
Для определения приведенного момента сил сопротивления, действующего на механизм, при динамическом анализе целесообразно использовать рычаг Жуковского. На рис. 5.4 и 5.5 приведены план скоростей, план ускорений и рычаг Жуковского для рассматриваемого механизма в положении 11. Расчеты планов скоростей и ускорений можно скачать по следующей ссылке: https://disk.yandex.ru/i/R3JcB9MGRZXarA
Выполнение рычага Жуковского при динамическом анализе проводится с целью расчета приведенного момента сил сопротивления Мс. Приведенный момент сил сопротивления представляет собой суммарный момент от внешних силовых факторов. Значение этого момента по модулю совпадает со значением уравновешивающего момента, однако направление его противоположно. При курсовом проектировании и иных учебных задачах с целью облегчения расчетов обычно не учитывают силы инерции и моменты сил инерции. В настоящем материале эти силы и моменты будут учтены.
В качестве примера рассмотрен расчет приведенного момента сил сопротивления и приведенного момента инерции для механизма в положении 11. Данный расчет необходимо повторять для каждого из 12 положений. Масштаб каждого следующего рычага Жуковского может отличаться от предыдущего. Длины отрезков рычага Жуковского для механизма в положении 11 приведены в табл. 5.2.
Таблица 5.2. Величины отрезков на рычагах Жуковского
В точке е (рис. 5.5) прикладывается сила полезного сопротивления Q, в точках s2 и s4 – силы тяжести G2 и G4, а также силы инерции F2 и F4. Также показываются моменты сил инерции М2 и M4, действующие на звенья 2 и 4. Поскольку отрезки ab и de на рычаге Жуковского противоположны отрезкам AB и DE на схеме механизма (рис. 5.4) моменты сил инерции <M2> и <M4> на рычаге Жуковского будут направлены в ту же сторону, что и угловые ускорения звеньев 2 и 4: ε2 и ε4 (в направлении по часовой стрелке) (подробнее о направлении моментов – см. раздел 4).
Приведенный момент Мc определяется по уравнению моментов этих сил относительно точки p (полюса) рычага
где <M2> и <M4> – относительные величины моментов M2 и M4, прикладываемых к рычагу; pm, pn, pg, pf, pe – плечи сил на рычаге, мм.
Несмотря на общепринятое правило знаков моментов сил, где направление против часовой стрелки является положительным, при расчете момента сопротивления Мс за положительное направление момента силы принимается то, в котором направлен момент от силы полезного сопротивления Q.
Момент <Мс> из уравнения (5.2)
Фактический момент Мc, Нм
Значения сил Gi, Fi и моментов Mi рассчитаны по формулам (4.1)-(4.3) из раздела 4. Здесь этот расчет не приведен. При необходимости читатель может самостоятельно выполнить этот расчет, используя результаты кинематического анализа (https://disk.yandex.ru/i/R3JcB9MGRZXarA) и исходные данные (рис. 5.3).
Несмотря на то, что полученное значение является отрицательным, направление момента сопротивления Мc на рис. 5.5 менять не следует.
Представленный расчет проводится для каждого из двенадцати положений механизма. Значения приведенного момента сил заносится в табл. 5.3.
Табл. 5.3. Результаты динамического анализа и синтеза маховика
Следующим этапом динамического анализа является расчет приведенного момента инерции, которым должен обладать кривошип относительно своей оси вращения, чтобы его кинетическая энергия равнялась кинетической энергии механизма. Формула для расчета приведенного момента инерции составляется на основании видов движений, которые совершают его звенья. Например, приведенный момент инерции Jп рассматриваемого механизма (рис. 5.3, рис. 5.4)
В уравнение (5.3) входят следующие слагаемые:
- момент инерции кривошипа, кг×м^2: Js1;
- приведенный момент инерции кулисы (звена, совершающего вращение с перемещением):
- приведенный момент инерции шатуна (звена, совершающего сложное плоскопараллельное движение (формула совпадает с предыдущей)):
- приведенный момент инерции ползуна (звена, совершающего поступательное движение):
Все слагаемые уравнения имеют размерность кг×м^2.
При наличии в механизме коромысла (звена, совершающего качательное движение), а также иных звеньев, совершающих вращение (вращающаяся кулиса и др.), приведенный момент инерции таких звеньев будет определяться в виде следующего слагаемого:
Отношения скоростей для слагаемых уравнения (5.3) могут быть найдены по отношению отрезков на планах скоростей или рычагах Жуковского (табл. 5.2), а также длин звеньев из исходных данных (рис. 5.3, рис. 5.4):
Пример расчета приведенного момента инерции для механизма в положении 11 (рис. 5.4):
Значения приведенного момента также заносятся в таблицу 5.3. По полученным значениям Mc строится горизонтальная диаграмма Mс(φ), а по полученным значениям Jп – вертикальная диаграмма Jп(φ) (рис. 5.6). Для их построения вычисляют масштабные коэффициенты μм и μj, предварительно задавая максимальные значения моментов {Mc max} = 60 мм и {Jп max} = 120 мм на чертеже:
Масштаб по оси φ
где 2π – полный оборот кривошипа, рад (360 град); 180 мм – длина оси φ.
График работ (рис. 5.6) строится путем графического интегрирования графика приведенных моментов сил. Для этого берется точка 1` (рис. 5.7) на графике Mс(φ) посередине интервала 0-1. Ордината точки 1` проводится до оси Y, а затем соединяется с точкой P, находящейся на расстоянии OP от начала графика. Полученный отрезок параллельно переносится на график работ. Аналогичным образом строится второй отрезок от точки 2`. В случае постепенного увеличения или уменьшения значения Mс данные отрезки являются касательными к получаемой диаграмме Aс(φ), а в случае прохождения максимумов и минимумов (положения 0, 3-4 и 10-11 на рис. 5.6) – отрезки будут пересекать ее. Действительные значения работы сопротивления для каждого из положений можно будет найти путем умножения на масштабный коэффициент µA
Метод графического интегрирования характеризуется сравнительно низкой точностью, поэтому в качестве альтернативы может быть использован метод численного интегрирования. В таком случае значения Aс1…Aс12 будут непосредственно определяться
где 0,5236 рад (30 град) – величина деления оси φ на графике.
В положении 1, например
На вал кривошипа, помимо приведенного момента сопротивления Мс, действует движущий момент Мд. В случае «мягкой» характеристики двигателя этот момент является постоянным. Работа движущих сил Aд при этом будет представлять собой линейную функцию. Для ее построения необходимо соединить начало и конец графика Aс(φ) прямой линией (рис. 5.6). Для построения графика Mд(φ) следует прямую графика Aд(φ) параллельно перенести в точку P. Пересечение прямой из точки Р с осью Y составит ординату прямой Mд(φ). Фактическое значение Mд можно посчитать из графика
либо численным дифференцированием
Изменение кинетической энергии механизма определяется посредством разности ординат движущей работы и работы сопротивления
Для оценки неравномерности движения механизма по формуле (5.1) следует выполнить расчет угловых скоростей. В рамках курсового проектирования расчет угловых скоростей можно осуществлять численным методом из формулы
откуда
Значение угловой скорости в положении 0 допускается подбирать итерационным методом до достижения среднего значения угловой скорости за цикл, равного номинальном
Полученные результаты занесены в таблицу 5.3. Коэффициент неравномерности движения по формуле (5.1)
Поскольку полученное значение больше допускаемого, следует выполнить расчет маховика методом Виттенбауэра (рис. 5.8). Для этого строится диаграмма, представляющая собой график ΔT(Jп). Она может быть построена путем проведения линий из графиков Jп(φ) и ΔT(φ) (рис. 5.6). Точки пересечения линий соединяются в порядке от 0 до 12(0). Для получения момента инерции маховика к диаграмме проводятся касательные с верхней и нижней стороны под углами ψmax и ψmin
где µA = µT – масштабный коэффициент графика кинетической энергии.
Построенные касательные отсекают на оси ΔT отрезок kl, равный 62 мм. Момент инерции маховика может быть рассчитан по следующей формуле
Расчет угловых скоростей после установки маховика может быть выполнен по формуле (5.4) с включением в нее момента инерции маховика
Значение угловой скорости в положении 0 подбирается итерационным методом до достижения среднего значения угловой скорости за цикл, равного номинальному, определяемому по формуле (5.5). Полученные данные сведены в таблицу 5.4. Графики угловых скоростей до и после установки маховика приведены на рис. 5.9.
Коэффициент неравномерности движения по формуле (5.1) после установки маховика
В завершении можно посчитать требуемую мощность двигателя Pд, Вт
Следует отметить, что в рамках учебных целей все приведенные выше расчеты выполнены без учета сил трения в кинематических парах, то есть требуемая мощность может быть выше на 5…15%.