Элементы платы
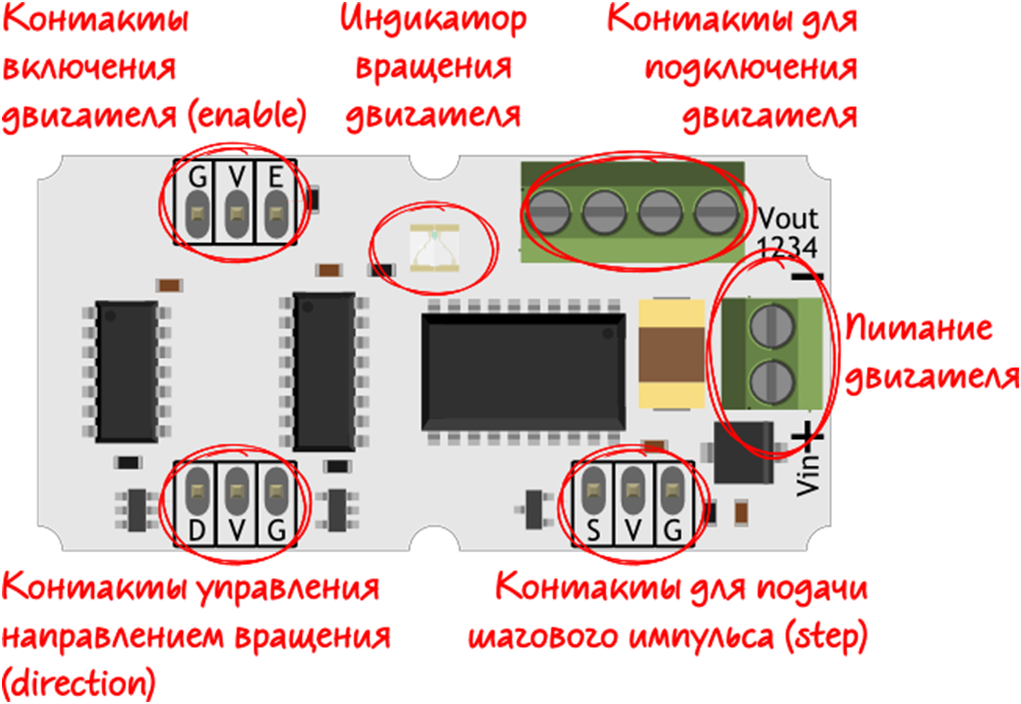
Подключение двигателя
На контакты 1, 2 подключается первая обмотка биполярного шагового двигателя. На контакты 3, 4 — вторая обмотка. Униполярный двигатель подключается точно также, просто не используются выводы из середин обмоток.
Питание двигателя
На колодки Vin подаётся напряжение 4,5–25 В постоянного тока. Для питания двигателя рекомендуется использовать отдельный контур питания, не связанный с цепью питания управляющего контроллера.
К примеру, если вы используете Arduino, не рекомендуется использовать питание с пина 5V Arduino. Это может привести к перезагрузке управляющего контроллера, или к перегрузке регулятора напряжения Arduino. В некоторых случаях допускается использовать для питания шагового двигателя пин Vin Arduino. Например, если Arduino запитана от мощного внешнего источника питания 7–12 В, напряжение которого при включении двигателя не падает ниже 7 В.
Контакты подключения 3-проводного шлейфа
Troyka-Stepper подключается к управляющей электронике по трём 3-проводным шлейфам. Назначение контактов 3-проводных шлейфов:
- Питание (V) — красный провод. На него должно подаваться напряжение 3,3–5 В, которое используется для питания логической части драйвера шагового двигателя.
- Земля (G) — чёрный провод. Должен быть соединён с землёй микроконтроллера.
- Сигнальный — жёлтый провод. Через него происходит управление соответствующим пином модуля.
Для управления модулем используется от одного до трёх сигнальных контакта:
- Step. Каждый раз, когда напряжение на этом контакте переходит из низкого уровня напряжения в высокий, шаговый двигатель делает следующий шаг.
- Direction. Направление вращения шагового двигателя зависит от схемы подключения его обмоток и от напряжения на этом пине. Если на пине direction установлен высокий уровень напряжения, двигатель вращается в одну сторону. Если низкий — в другую. Если изменять направление вращения двигателя не нужно, вы можете не подключать этот контакт к микроконтроллеру.
- Enable. Высокий уровень на этом пине включает подачу напряжения на двигатель. При остановке шагового двигателя в определённом положении, питание продолжает поступать на его управляющую обмотку. Это приводит к нагреву шагового двигателя и излишнему расходу электроэнергии. Чтобы отключить подачу питания на двигатель, достаточно выставить низкий уровень напряжения на этом контакте. При остановке двигателя бывает полезно подать на этот контакт ШИМ-сигнал. Это позволит оставить на двигателе небольшое усилие, необходимое для удержания вала в текущем положении. Электроэнергии в таком случае будет тратится значительно меньше. Если нет необходимости управлять включением двигателя, вы можете не подключать этот контакт к микроконтроллеру. Тогда ток через обмотки двигателя будет течь всегда, если есть напряжение питания.
Индикатор вращения двигателя
Светодиодный индикатор. Горит зелёным при шаге в одну сторону, красным - при шаге в другую сторону.
Пример использования
Подключение 3-проводных сенсоров.
Существует большое количество сенсоров совместимых с Arduino, которые подключаются по трём проводам:
- Питание (Vcc) — красный провод. На него должно подаваться напряжение, указанное в документации на сенсор. Чаще всего 5 В — это норма.
- Земля (GND) — чёрный провод. Должен быть соединён с землёй микроконтроллера.
- Сигнальный. С него считываются показания сенсора. Для сенсоров с цифровым сигналом он зелёный (D); для сенсоров с аналоговым сигналом он синий (S)
Внимание!
В новой ревизии 3-проводных сенсоров производства DFRobot была изменена распиновка питания. Внимательно проверяйте полярность подключения вашего датчика перед включением напряжения. Подробности здесь.
Подключение через IO SHIELD
Провода на таки.х сенсорах с одного конца обжаты коннектором для подключения к плате сенсора, а с другого конца — коннектором предназначенным для включения в штырьковые контакты на принимающей стороне. IO Shield, плата расширения для Arduino делает процесс подключения сенсора к нужным контактам микроконтроллера тривиальным.
На ней расположены группы штырьковых контактов, разбитые на тройки. Каждая из троек соединена с питанием, землёй и одним из входов/выходов Arduino.
Для подключения сенсора достаточно просто включить его коннектор в одну из троек.
Обратите внимание на маркировку возле контактов и убедитесь что она соответствует назначению проводов, выходящих из коннектора к сенсору. Если вы вставите коннектор вверх ногами, сенсор просто не заработает: никаких повреждений случится.
После физического подключения сенсора, можно приступать к считыванию его показаний. Как именно это сделать, зависит от конкретного сенсора. Точнее: от типа его сигнала и протокола. Обратитесь к странице с обзором сенсоров, чтобы определить как организована коммуникация с каждым датчиком.