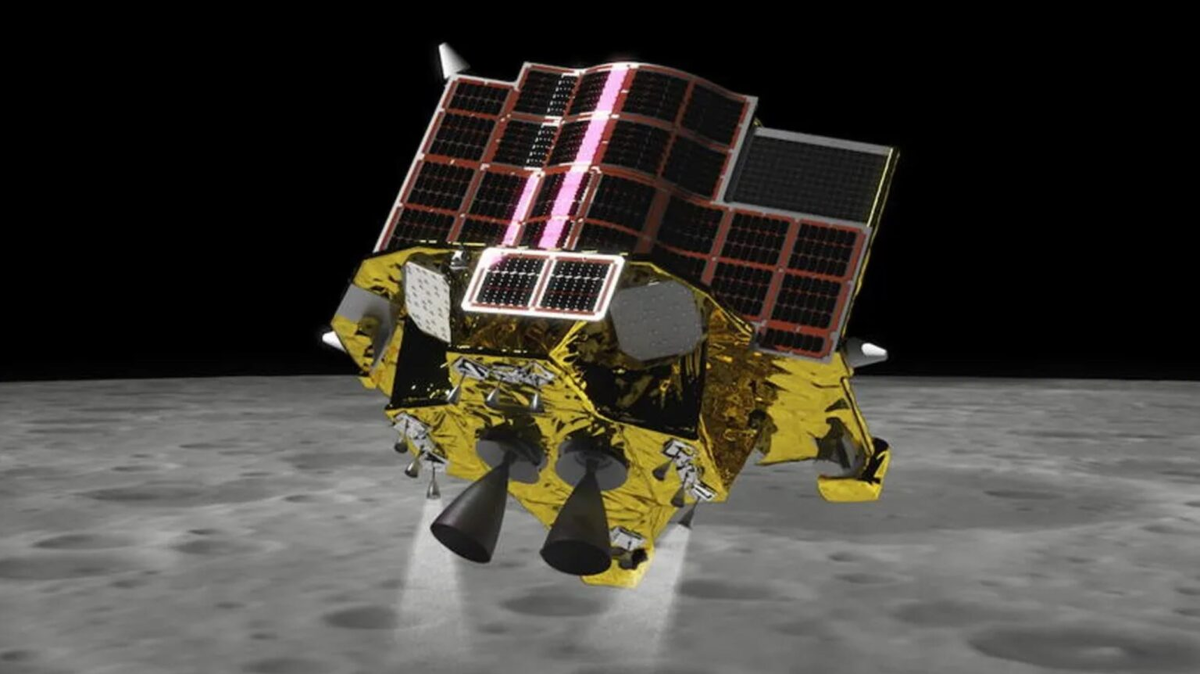
Посадочный модуль Smart Lander for Investigating Moon (SLIM) пролетел в чуть менее чем 5000 километров от поверхности Луны с относительной скоростью 1,47 км/с.
Аппарат был запущен 6 сентября на ракете H-2A из японского космического центра Танегасима вместе с космическим телескопом XRISM. Затем космический корабль прошел серию проверок систем и маневров по изменению орбиты.
Аппарат сейчас движется по орбите, которая вернет его к Луну в конце года. Как поясняет команда миссии, это позволит ему выйти на лунную орбиту с более эффективным использованием топлива, чем при необходимости выполнять длительное торможение во время пролета. Представители Японского агентства аэрокосмических исследований (JAXA) на 74-м Международном астронавтическом конгрессе сообщили, что попытка приземления запланирована на январь 2024 года.
Южный полюс Луны все еще не освоен
Об этом заявил СМИ китайский ученый Оуян Цзыюань, главный научный сотрудник первой лунной миссии Китая. Он считает, что было бы неточно утверждать, что индийский корабль приземлился вблизи южного полюса Луны, поскольку «Чандраян-3» прилунился в точке, расположенной на 69-й широте в 600 километрах от южного полюса. Оуян утверждает, что эта точка действительно находится в южном полушарии спутника Земли, но не в полярном регионе, который, по его мнению, расположен «между 88,5 и 90 градусами широты».
Что касается следующего этапа российской лунной программе, то им станет отправка к Луне картографа-ретранслятора «Луна-26», запуск которого пока запланирован на 2027 год. В интервью после аварии автоматической станции «Луна-25» глава Роскосмоса Юрий Борисов отметил, что Роскосмос обязательно получит «недополученные результаты», форсируя миссии «Луна-26» и «Луна-27». Из чего можно сделать предположение, что реализация программы может быть ускорена.
По итогам расследования причин аварии «Луны-25» пресс-служба госкорпорации сделала заявление, согласно которому посадка не удалась из-за нештатного функционирования бортового комплекса управления, связанного с невключением блока акселерометров в приборе БИУС-Л (блок измерения угловых скоростей).