Лента из жидких кристаллов способна преодолевать препятствия благодаря своей структуре.
Своим новым достижением в сфере робототехники поделилась команда из государственного Университета штата Северная Каролина в США. Они усовершенствовали мягкого робота, созданного ими ранее. Описание устройства и все проведенные над ним эксперименты опубликованы в журнале Science Advances.
Мягкий робот представляет собой ленту, сформированную эластомерами (полимерами, обладающими высокоэластичными свойствами и вязкостью) из жидких кристаллов. Под действием внешнего источника тепла она сокращается, смещая центр тяжести устройства. Таким образом устройство катится в сторону, пока не столкнется с препятствием. Оно похоже на примитивную детскую машинку, которая при встрече со стеной или ножкой стула меняет свое направление.
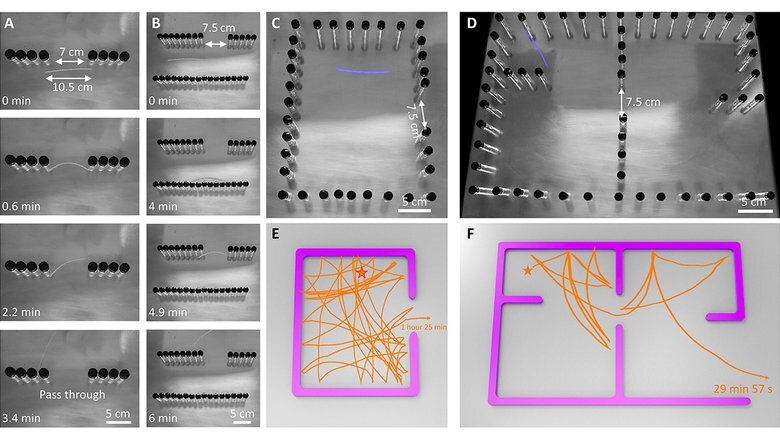
Новый робот отличается от предшественника ассиметричной конструкцией. Одна половину уменьшается в длину, а вторая скручивается спиралью. Такое изменение помогло решить проблему с застреванием робота между параллельными стенками.
- Теперь устройство всегда двигается под углом и может за считаные минуты выбраться из лабиринта, даже при условии, что проход меньше его длины или конфигурация всего пути меняется на ходу.
Для того, чтобы мягкий «безмозглый» робот двигался, поверхность под ним надо нагреть до 55 градусов, в то время как окружающий воздух должен быть холоднее. Чем больше разность температур и выше градус плоскости, тем быстрее передвигается устройство. Проходимость своего изобретения ученые проверили на металлической подложке и песке.
- Данный мягкий робот может быть использован в условиях, где нет внешнего источника электричества. Это и отличает изобретение от остальных механизмов, которых надо программировать с применением вычислительной техники, то есть оно работает на основе физического интеллекта.
Робот может нести на себе датчики и проникать в подземные ходы, куда приходилось бы отправлять человека или насекомоподобное устройство. Главное, чтобы сохранялась разница температур между атмосферой и поверхностью, по которой механизму предстоит передвигаться.