Как летает вертолет
Подъемная сила и тяга для поступательного движения у вертолета создается с помощью несущего винта. В работе несущего винта вертолета и воздущного винта самолета есть много общего, но имеются и отличия. Сравнивая их работу, можно заметить, что при одинаковой мощности двигателя тяга несущего винта вертолета всегда больше, благодаря тому что диаметр несущего винта вертолета во много раз больше диаметра воздушного винта самолета.
Как брать ключи в поход видео
Тяга несущего винта в значительной степени зависит от его диаметра и числа оборотов. Так, при увеличении диаметра винта вдвое тяга его увеличивается приблизительно в 16 раз; при увеличении числа оборотов вдвое — примерно в 4 раза.
Несущий винт вертолета обладает исключительно важным свойством -— способностью создавать подъемную силу в режиме самовращения (авторотации) в случае остановки двигателя, что позволяет вертолету совершать безопасный планирующий или парашютирующий (вертикальный) спуск и посадку.
При висении и при вертикальном подъеме несущий винт (ротор) вертолета работает подобно воздушному винту. При поступательном полете ось его вращения наклоняется вперед и он работает в режиме косой обдувки (рис. 7.8).
Скорость движения лопасти относительно воздуха неодинакова. Она меньше у оси вращения и больше у конца лопасти и, кроме того, меняется в зависимости от положения лопасти по отношению к направлению полета. Так, при вращении винта скорость лопасти, движущейся вперед, слагается из скоростей от ее вращения и поступательного движения вертолета. Для лопасти же, движущейся назад, скорость будет определяться разностью между скоростью от вращения винта и от поступательного движения вертолета.
Из-за меньшей скорости у лопасти, движущейся назад, будет меньше и подъемная сила. Чтобы этого не произошло, с помощью автоматических устройств увеличивают ее угол атаки для сохранения равновесия. При остановке двигателя в воздухе вертолет переходит на режим авторотирования. В этом случае винт-ротор вращается без подвода мощности в результате действия аэродинамических сил. Последние обеспечивают необходимую тягу ротора и поддерживают его вращение. Но величина аэродинамических сил зависит от многих факторов. Основной из них — направление обдувки ротора воздушным потоком. Для обеспечения авторотации необходима определенная скорость этого потока (прямого или косого), т. е. вертолет должен перемещаться относительно потока. Вот почему для безопасной авторотирующей посадки вертолет должен иметь запас высоты.
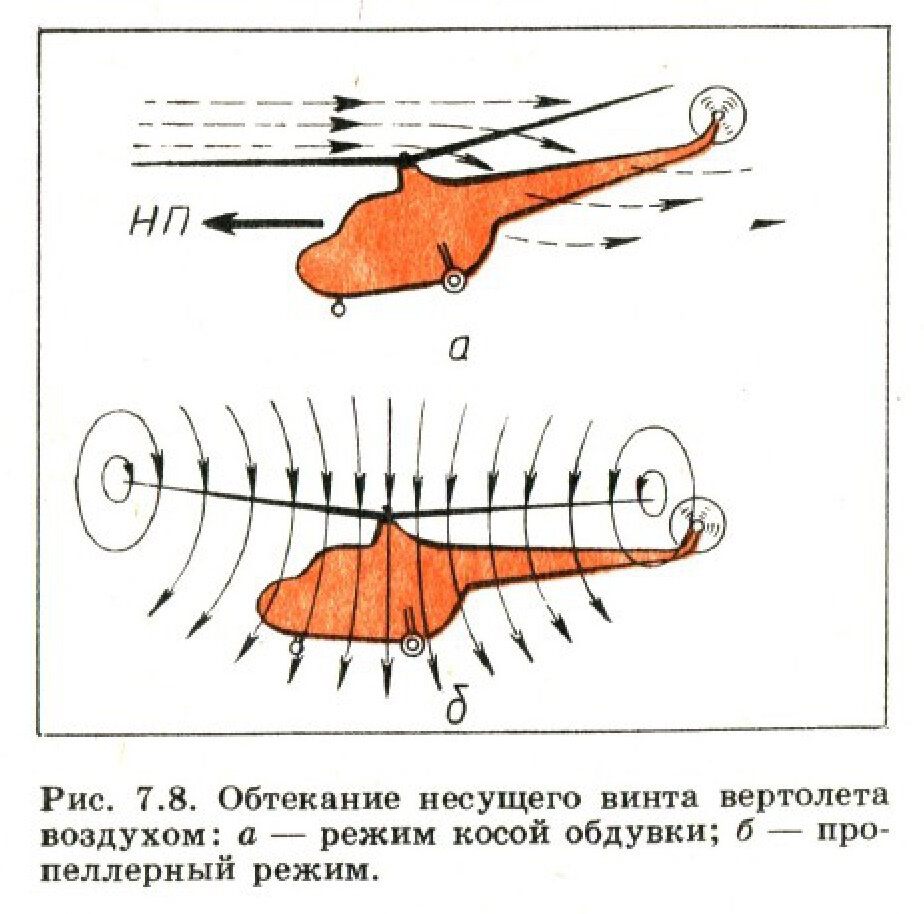
Рис. 7. 8 Обтекание несущего винта вертолета воздухом: а — режим косой обдувки; б — пропеллерный режим.
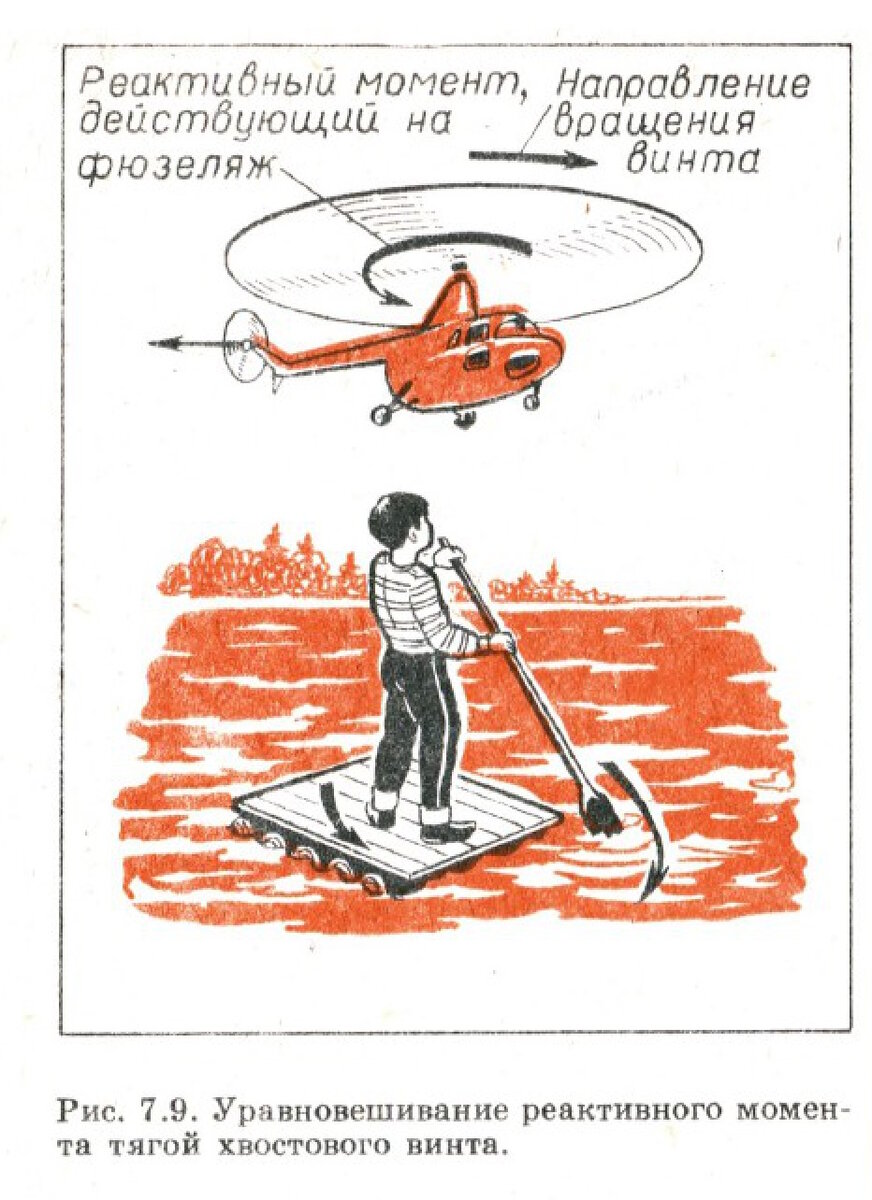
Рис. 7.9. Уравновешивание реактивного момента тягой хвостового винта.
Рис. 7.10. Двухвинтовые вертолеты: а — соосной схемы; б — продольной схемы; в — поперечной схемы.
По числу несущих винтов современные вертолеты принято классифицировать на одновинтовые, двухвинтовые и многовинтовые.
Вам не нравится погода на Балтийском море? Подождите 15 минут, будет хуже видео
Наиболее распространена одновинтовая схема. Кроме несущего, одновинтовой вертолет обычно имеет хвостовой винт. Основное назначение хвостового винта состоит в том, что он гасит реактивный момент, который стремится развернуть вертолет в полете в сторону, противоположную вращению несущего винта. Чтобы понять это явление, представим себе человека, плывущего на плоту (рис. 7.9). При попытке развернуть плот он стремится повернуться в сторону, противоположную направлению движения весла.
Для того чтобы вертолет в полете не вращался, необходимо приложить к нему такой же момент, как и к несущему винту, но противоположного направления. Такой момент относительно центра тяжести вертолета и создает основной винт. Момент равен произведению силы на плечо, поэтому хвостовой винт стараются расположить в хвостовой части вертолета на возможно большем расстоянии от его центра тяжести, с тем чтобы увеличить плечо приложения силы, развиваемой винтом.
Рис. 7.11. Схема сил, действующих на вертолет при горизонтальном полете: А — плоскость вращения винта при висении; Б — при горизонтальном полете.
Вторая функция хвостового винта — путевое управление вертолетом. Это достигается путем изменения установочных углов лопастей хвостового винта, приводимого во вращение из кабины пилота с помощью ножных педалей. С изменением углов установки меняется тяга рулевого винта и нарушается равновесие реактивного момента и момента тяги хвостового винта, действующих на вертолет, что позволяет поворачивать вертолет в нужном направлении.
Двухвинтовые вертолеты подразделяются на несколько подгрупп.
К ним относятся вертолеты соосной схемы (рис. 7.10, а), при которой на одной оси расположены один над другим два несущих винта, вращающихся в противоположные стороны; вертолеты продольной схемы (рис. 7.10, б) с расположением несущих винтов на концах фюзеляжа; вертолеты поперечной схемы (рис. 7.10, в) с расположением двух несущих винтов на крыле.
При двухвинтовой схеме вертолета реактивные моменты одинаковых несущих винтов взаимно уравновешиваются, потому что винты вращаются в противоположные стороны с одинаковой скоростью (поэтому на таких вертолетах нет хвостовых винтов).
Горизонтальный полет является основным режимом полета вертолета, так как он обычно занимает наибольшую часть времени полета. Необходимая тяга для поступательного горизонтального или наклонного движения вертолета создается наклоном плоскости вращения винта. При этом соответственно наклоняется и равнодействующая аэродинамических сил R на винте. В горизонтальном полете вертикальная составляющая силы R дает подъемную силу У, уравновешивающую силу тяжести G, а горизонтальная составляющая — тягу Р для движения по горизонту, уравновешивающую лобовое сопротивление X вертолета (рис. 7.11).
Мой туристический рюкзак для походов за кладами видео
Теги : модель планера, модель корабля. модель яхты, поделки с детьми, как сделать своими руками, поделки своими руками, запуск модели планера с помощью леера