Автор: учащийся 11 класса школы №24 г. Ярославля Илья Ярушкин.
Введение.
Во множестве прикладных технических задач необходимы различные датчики перемещений, в том числе датчики угла поворота. В настоящее время разработано множество устройств, предназначенных для измерения угла поворота. Известны как аналоговые датчики, так и цифровые. У последних есть серьезное преимущество - они надежно сопрягаются с микропроцессорными системами управления исполнительными механизмами. Точность измерений с помощью цифровых датчиков задана непосредственно дискретной функцией преобразования аналоговой измеряемой величины в цифровую. Процесс преобразования сигнала из аналога в цифру происходит в различных измерительных устройствах по-разному. В одних системах механический сигнал о перемещении после множества аналоговых преобразований из механической формы в электронную преобразуется в цифровой код непосредственно на входе в процессор. В других системах эти преобразования происходят сразу на этапе перехода от механического к электронному сигналу минуя множество промежуточных звеньев.
Например:
- электростатический датчик угла поворота в виде конденсатора, емкость которого зависит от угла поворота его обкладок. Он представляет собой многоступенчатую аналоговую систему, где трансформация сигнала из аналоговой формы в цифровую происходит в конце цепи преобразования.
- датчик перемещения в виде линейки электроконтактов преобразует перемещение непосредственно в цифровой сигнал и представляет собой более простую и надежную систему.
Однако, у измерительных систем второго типа кроме таких достоинств, как простота конструкции и надежность работы есть типичный недостаток - подобные измерительные системы дороги в изготовлении и требуют для этого оборудования высшего класса точности.
В настоящей работе предлагается голографический способ изготовления датчиков перемещения и угла поворота, что позволит во много раз снизить их себестоимость и повысить точность измерения.
Оптические растровые системы.
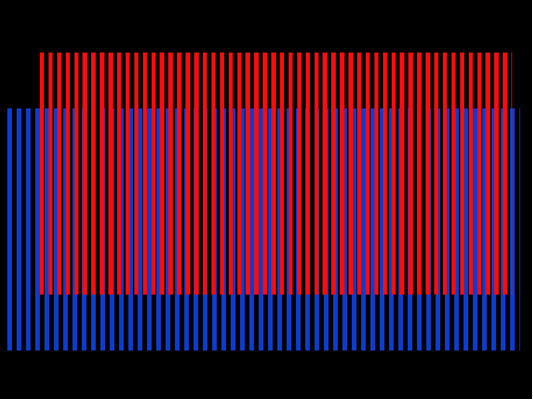
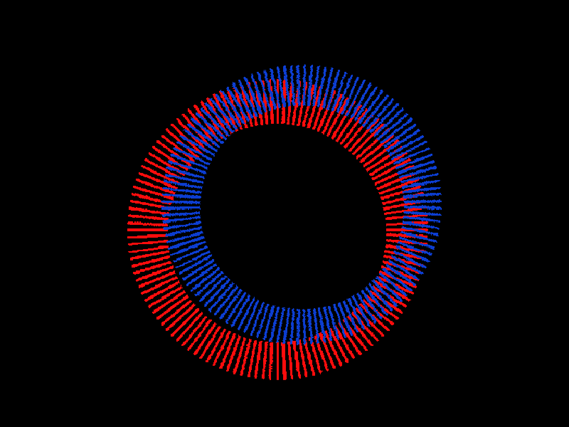
Рассмотрим систему из двух параллельных идентичных периодических одномерных растров, расположенных на некотором расстоянии друг от друга. Параллельное смешение одного растра относительно другого вызовет модуляцию света, проходящего через систему, от полной темноты до некоторого максимума. Модуляция света при перемещении элемента системы есть не что иное, как цифровой сигнал о перемещении. Аналогичный эффект возникает при повороте системы подобных растров относительно оси, параллельной элементам растра (см. рис. 1 и 2).
На основе линейных и радиальных растровых систем изготавливают высокоточные датчики линейных и угловых перемещений. Однако, цены на них очень высоки в связи с большой трудоемкостью изготовления мастер-растров, с которых затем методом контактной фотопечати изготавливают копии.
Постановка задачи.
С появлением когерентных источников светового излучения - лазеров, появилась возможность создания так называемых голографических оптических элементов (ГОЭ). ГОЭ - это и голографические фокусирующие системы с необыкновенно сложными функциями преобразования оптического сигнала, это и адаптивные системы сопряжения, и параллельные оптические процессоры колоссальной производительности. Голографическая дифракционная решетка - это простейший вид ГОЭ. Он не только полностью идентичен решеткам, изготовленным механическими способами, но обладает рядом положительных качеств, таких как исключительная линейность функции преобразования сигнала.
Два пересекающихся плоских когерентных пучка света образуют зону интерференции в виде плоскостей минимумов и максимумов света, частота которых определяется углом их схождения и длиной волны (см. рис. 3).
D = l/sin(j );
где:
D - период плоскостей интерференции;
l - длина волны света;
j - угол схождения пучков света.
Если поместить в зону интерференции когерентных плоских волновых фронтов высокоразрешающую фотопластину и проэкспонировать ее, то можно записать высококачественную дифракционную решетку с периодом от (l/2) до несольких сотен микрометров и даже более.
Возможность оптическим путем синтезировать высококачественные растры и растровые системы, позволяет разработать дешевую технологию изготовления датчиков перемещений голографическим способом.
Голографический датчик угла поворота на основе двух синфазных дифракционных решеток.
Автором предлагается конструкция простого датчика угла поворота в виде малогабаритной системы параллельных дифракционных решеток с одинаковыми значениями периодов (см. рис. 4).
Принцип работы датчика.
Принцип работы датчика рассмотрим на основе упрощенной схемы (рис.4), где:
h - расстояние между дифракционными решетками А и В.
D - период дифракционных решеток.
j - угол дифракции.
Всвязи с тем, что ГОЭ имеют одинаковые функции преобразования волнового фронта, можно предположить, что два луча, вошедшие в систему в точках 1а и 2а выйдут в точках 1в и 2в. Существуют условия, когда эти точки совпадают. Если углы дифракции обеих ГОЭ идентичны, то можно доказать, что нулевой порядок дифракции луча 2 частично перейдет в первый порядок дифракции на решетке В и совпадет с нулевым порядком дифракции (на решетке В) составляющей первого порядка дифракции на решетке А луча 1.
Если лучи 1 и 2 когерентны, то они будут интерферировать. В результате интерференции на выходе системы в соответствующем порядке дифракции будем наблюдать максимумы или минимумы освещенности фотоприемника в зависимости от угла поворота нашего голографического "сэндвича".
Рассмотрим условия когерентного сложения лучей в первом порядке дифракции на выходе системы ГОЭ:
После несложных преобразований приведенной выше системы уравнений в параксиальном приближении получим уравнение величины дискрета датчика угла поворота (Dj) :
Формула определяет приращение угла поворота датчика относительно оси светового пучка, соответствующее периоду его модуляции в первом порядке дифракции. Проще выражаясь, формула определяет цену деления логической единицы цифрового выходного сигнала датчика.
Экспериментальные исследования.
Для того, что бы провести экспериментальную проверку предложенного метода измерения угла поворота и технологии изготовления датчика, автор воспользовался голографической установкой лаборатории когерентных исследований Ярославского Государственного педагогического университета им. Ушинского.
Использованное оборудование и материалы:
- колимационный объектив F=200 мм,
- рейторы,
- оснастка для крепления фото пластины,
- гелий-неоновый лазер ЛГ 222,
- стол виброизолированный,
- пинхол,
- бипризма Френеля,
- зеркала формирования оптической схемы,
- фотопластины ПФГ-03М,
- проявитель ГП-2,
- клей циакриновый,
- фотосопротивление,
- мультиметр,
- столик поворотный с микрометрической шкалой.
Изготовление заготовки датчика производилось склеиванием двух фотопластин через стеклянные прокладки таким образом (см. рис.5), что бы фотоэмульсия оказалась внутри "сэндвича" с целью защиты от механических повреждений при фотохимической обработке.
Формула определяет приращение угла поворота датчика относительно оси светового пучка, соответствующее периоду его модуляции в первом порядке дифракции. Проще выражаясь, формула определяет цену деления логической единицы цифрового выходного сигнала датчика.
Изготовление заготовки датчика производилось склеиванием двух фотопластин через стеклянные прокладки таким образом (см. рис.5), что бы фотоэмульсия оказалась внутри "сэндвича" с целью защиты от механических повреждений при фотохимической обработке.
После этого заготовка экспонировалась в оптической схеме (см. рис.6), собранной на вибро изолированном столе.
Выводы:
В результате проведенных исследований согласованных ГОЭ в виде двух параллельных дифракционных решеток, автор получил подтверждение спрогнозированных на основании теоретических выкладок свойств датчика.
Автором предлагается использовать предложенный метод измерения углов в цифровых устройствах сканирования или лучевой развертки в качестве элемента обратной связи.