Американские инженеры создали простой и недорогой киригами-манипулятор. Он представляет собой лист материала со множеством прорезей, образующих определенный рисунок, благодаря которому при растяжении лист выгибается, образуя купол со смыкающимися лепестками. С помощью манипулятора можно точно взаимодействовать с ультратонкими и хрупкими объектами, не повреждая их, а также поднимать грузы в 16000 раз тяжелее собственной массы захвата. Статья с описанием конструкции опубликована в журнале Nature Communications.
При поддержке Angie — первого российского веб-сервера
Все попытки инженеров разработать универсальный мягкий манипулятор для роботов, который смог бы совместить в себе одновременно высокую точность и способность поднимать тяжелые предметы, обычно упираются в компромисс между гибкостью, прочностью и точностью захвата объектов. К примеру, мягкий манипулятор ROSE, напоминающий своей формой цветок, имеет довольно высокое значение отношения грузоподъемности к собственной массе и способен захватывать хрупкие предметы, не нанося им вреда, например, куриное яйцо. Однако из-за особенной формы и способа срабатывания он не может захватывать слишком мелкие объекты, такие как нити и тонкие листы.
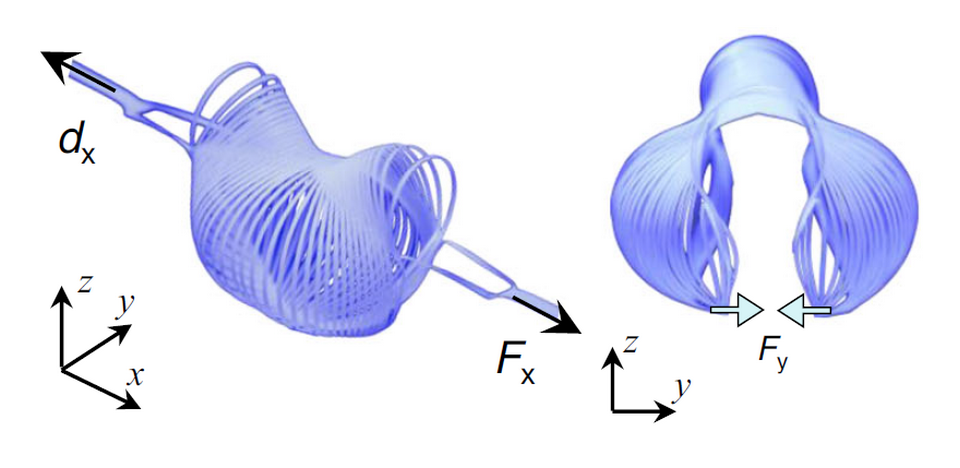
Инженеры под руководством Цзе Иня (Jie Yin) из Университета Северной Каролины предложили конструкцию манипулятора, которая способна решить эту проблему. В ее основе лежит японская техника складывания и вырезания бумаги киригами. Манипулятор изготавливается из тонкого листа полиэтилентерефталата (PET) толщиной 127 микрометров, в котором с помощью лазера делается множество узких прорезей по определенному паттерну. Благодаря этим прорезям при растяжении в перпендикулярном направлении лист выгибается, принимая форму, напоминающую шаровидную клетку, состоящую из двух половин в виде смыкающихся лепестков. Для срабатывания захвата достаточно лишь растянуть его в одном направлении, поэтому манипулятор можно использовать как дополнение к уже существующим моделям роборук и протезам без серьезных переделок.
Давление, с которым половинки захвата воздействуют на объект, составляет всего около 0,05 килопаскаля. Это позволяет безопасно поднимать очень мягкие и хрупкие объекты с близкой к нулю жесткостью. Авторы экспериментировали с каплями воды, кетчупом, сырым яичным желтком, икрой, пудингом, а также с мягкими живыми организмами, такими как медузы. Сетчатая структура манипулятора подходит и для манипуляций с острыми объектами, например, медицинскими иглами. Они проходят сквозь прорези в материале, никак не влияя на целостность и функциональность манипулятора.
Манипулятор может очень точно взаимодействовать с тонкими гибкими предметами, к примеру, с нитями толщиной 2 микрометра, что меньше толщины человеческого волоса в 40 раз, и с тонкими листами до 4 микрометров. Для демонстрации точного взаимодействия с объектами в бытовых условиях, инженеры прикрепили манипулятор к концам эффекторов протеза. Оказалось, что с помощью такого дополнения можно легко выполнять действия, иначе конструктивно недоступные для протеза. Брать очень мелкие предметы с поверхности, например, ягоды винограда, не повреждая их, и переворачивать страницы книги.
Одновременно с высокими характеристиками точности и способностью взаимодействовать с очень хрупкими объектами, манипулятор обладает рекордным значением отношения массы полезной нагрузки к собственной массе. Масса захвата составляет всего 0,4 грамма, однако оказалось, что он способен поднимать объекты в 16000 раз тяжелее себя. Это, по словам авторов, в 2,5 раза превосходит предыдущий рекорд, который составлял 6400.
Материал для захвата можно использовать биоразлагаемый. В этом случае его можно применять для задач, ограниченных по времени и числу применений, к примеру, для биомедицинских целей в качестве одноразового устройства.
Техника оригами также часто используется в робототехнике. Например, японский инженер использовал ее для создания механического одноразового захвата, полностью состоящего из обычной офисной бумаги.
