В предыдущих уроках мы смогли убедиться, что полноценное управление даже простым моторчиком связанно с применением ряда инженерных решений. Если моторчики используются в составе робота, то есть необходимость в частой смене направления вращения вала. Также возникает потребность в регулировании напряжения.
В электронной промышленности уже давно сформировался принцип решения таких задач. Чтобы упростить управление каким-либо сложным устройством, используется специальный драйвер. На этот драйвер подаются простые слабые сигналы, а на выходе формируются сигналы в том виде и с теми характеристиками (напряжением и силой тока), которые требуются для управления устройством. Для управления электродвигателями давно выпускается микросхема драйвера. Мы рассмотрим вариант микросхемы с маркировкой L293D.
Микросхема выпускается в стандартном корпусе и ничем не отличается от остальных. L293D является одной из самых популярных благодаря своей универсальности. Она обладает характеристиками, которые хорошо подходят для управления коллекторными или двухфазным шаговым электродвигателем. L293D. Предназначена для одновременного управления 2-мя коллекторными электродвигателями. В ней реализованы все возможные функции защиты от неприятных ситуаций. Прежде всего - это защита от короткого замыкания. Можно одновременно подавать любые сигналы на любые входы, и ничего плохого не случится. Помимо этого есть защита от помех на выходных контактах, защита от ЭДС самоиндукции при работе моторчика и даже защита от перегрева.
Распиновка и внешний вид L293D показан на рисунке.
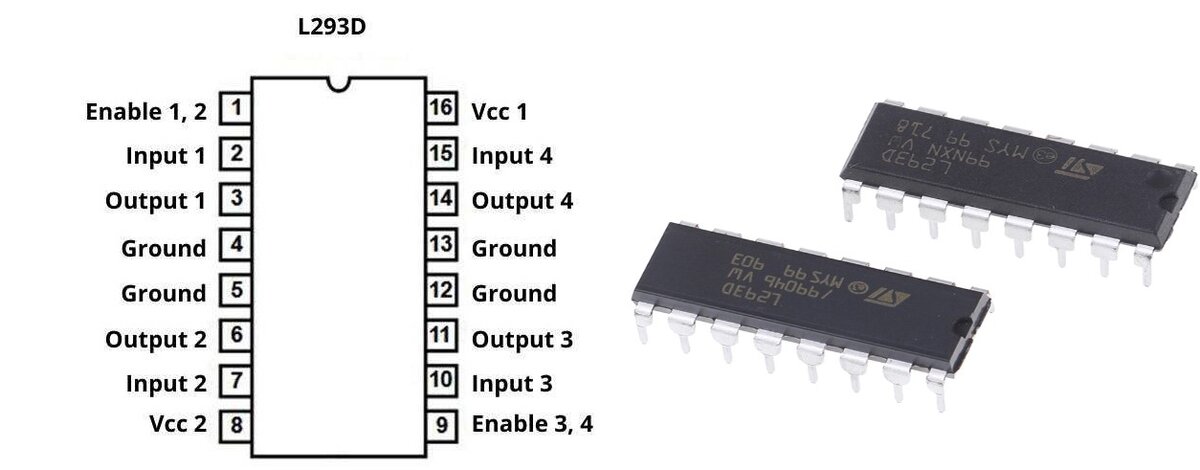
У микросхемы есть 16 контактов (по 8 с каждой стороны) и она обладает несколькими отличиями.
Первым таким отличием является то, что она обладает двумя контурами питания. Один предназначен для обработки входных сигналов. А второй контур - для питания выходных сигналов, идущих на двигатели. Разделение это связанно с тем, что выходные сигналы являются слаботочными и требуют напряжение от 2,3 до 7 В (номинальное напряжение 5В). А выходные сигналы могут иметь напряжение 36В и номинальный ток 0,6 А (в кратковременном пике до 1,2 А).
Второй особенностью является то, что она на чистой TTL логике, а такие устройства являются прожорливыми в плане энергопотребления.
Разъясним принцип работы микросхемы, а заодно разберемся с назначением всех контактов. При подаче высокого уровня напряжения (от 2,2 до 7 В) на входной контакт INPUT 1 на выходном контакте OUTPUT 1 также устанавливается высокий уровень напряжения. Аналогично при логической 1 на контактах INPUT2, INPUT3 и INPUT4 появляется логическая единица на выводах OUTPUT 2, OUTPUT 3 и OUTPUT 4 соответственно. Если на любом из входов логический 0 (напряжение от 0 до 1,5 В), то на выходах тоже нули и при этом выводы соединены с "землей".
Контакты Vss 2, Vss 1 и GND (Ground) отвечают за питание. Причем на контакт Vss 2 подается питание силовой части - напряжение, которым питаются электродвигатели (до 36 В). На Vss 1 подается питание логической части (от 4,5 до 7 В). На GND подается "минус" пины также разведены, но это не принципиально.
ENABLE 1 и ENABLE 2. В переводе с английского слово ENABLE означает "включить". При подачи на них логических единиц включается управление парами выходов OUTPUT 1 и OUTPUT 2 (за них отвечает ENABLE 1) и OUTPUT 3 c OUTPUT 4 (за них отвечает ENABLE 2).
Получается, что микросхема фактически представляет собой набор из 4-x ключей для 4-x линий. Очень похоже на работу реле, только в место электромагнитов, механически замыкающих контакты, используются транзисторные ключи. Ключи могут переключатся с частотой 5 килогерц (5000 раз в секунду).
В следующем уроке мы рассмотрим принцип и особенности сервопривода. А также узнаем в каких современных гаджетах и технике он применяется. Не пропусти!!!