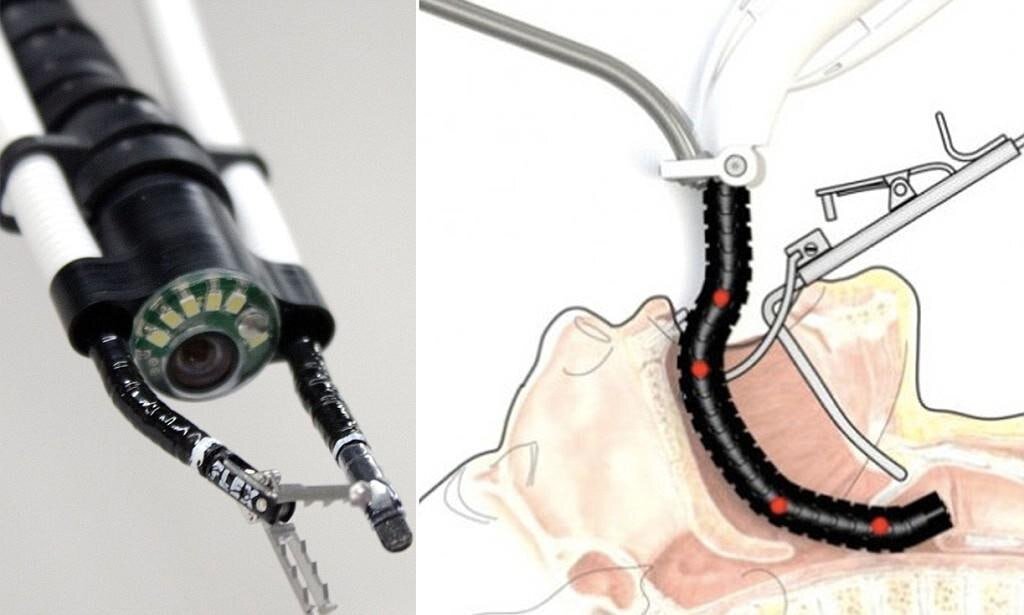
Змееподобные роботы обладают уникальными характеристиками, которые делают их очень удобными для многих технологических приложений. Так, гибкие тела и характерные змеиные движения могут помочь при минимально инвазивных операциях и эндоскопических вмешательствах, проникая в тело пациента через нос и добираясь до целевых областей.
Однако методы управления такими роботами до недавнего времени были малоэффективны. В первую очередь это связано с тем, что змееподобные роботы обладают слишком большим числом степеней свободы, — гнутся практически в любом направлении и почти в любой точке тела. А электронные устройства, используемые для управления движениями таких роботов-змей, редко позволяют управлять более чем шестью степенями свободы.
В ответ на этот вызов ученые из Университета Лейбница в Ганновере разработали новый алгоритм интуитивно понятной телеманипуляции, позволяющий эффективно и точно управлять движениями и ориентацией подобных гибких роботов. Новая стратегия подойдет прежде всего для решения эндоскопических задач в медицине, но может пригодиться и для мягких роботов других модификаций и предназначений.



















