- Какой микропроцессор стал прародителем микроконтроллеров.
• Микропроцессор Intel 4004 считается прародителем микроконтроллеров.
2)Какая компания конкурировала с Intel в разработке и производстве чипов.
Моторола
3)Какая компания первой стала выпускать микроконтроллеры.
Intell
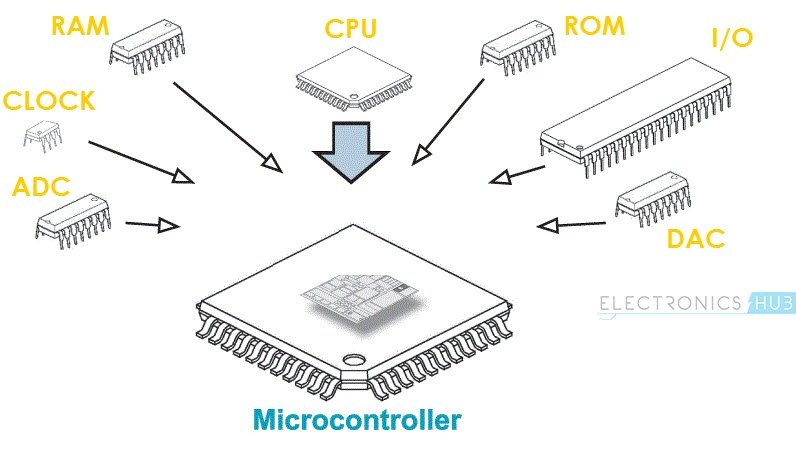
4)Что входит в базовую структуру микроконтроллера.
5. Из каких элементов состоит регистры и каких типов они бывают.
Регистры состоят из набора триггеров и могут быть различных типов
В целом, регистр — это особый вид памяти внутри микроконтроллера, который используется для управления процессором и периферийными устройствами. Каждый регистр в архитектуре ARM представляет собой ячейку памяти и имеет длину в 32 бита, где каждый бит можно представить в виде крошечного выключателя с помощью которого осуществляется управление тем или иным параметром микроконтроллера.
В целом стоит отметить, что существует два вида регистров: регистры общего назначения и специальные регистры. Первые расположены внутри ядра МК, а вторые являются частью RAM-памяти.
Итак, обычно структура регистра описывается в виде небольшой таблицы с указанием:
- Названия регистра и описания его назначения
- Адреса регистра или смещением относительно базового адреса
- Значения по умолчанию после сброса
- Типа доступа к ячейкам регистра (чтение, запись, чтение/запись)
- Значения и описания параметров записываемых битов
6) Что такое конвейер инструкций.
Конве́йер — способ организации вычислений, используемый в современных процессорах и контроллерах с целью повышения их производительности (увеличения числа инструкций, выполняемых в единицу времени — эксплуатация параллелизма на уровне инструкций).
ARM -advanced risk machine
STM32 - семейство 32-битныйх контроллеров
7. Сколько режимов работы у пинов GPIO.
00 Input
01 Output
10 AF
11 Analog
8) Что значит режим выхода push-pull и open-drain.
Режим Push-pull - это стандартный двухтактный выход, и в этом режиме логический сигнал, выставленный в соответствующем бите выходного регистра порта, соответствует логическому уровню на линии ввода-вывода.
Режим Open-drain, или открытый сток, может использоваться, например, для управления нагрузкой с большим напряжением, чем напряжение питания микроконтроллера.
Push-pull стандартный выход: выставляешь 0 в выходном регистре — получаешь низкий уровень на выходе, выставляешь 1 — получаешь высокий.
Open-drain (открытый сток, аналог открытого коллектора): вывод подключен к стоку N-MOS полевика в то время, как P-MOS полевик заперт, что позволяет управлять нагрузкой с большим напряжением, чем Vdd (3.3 В). Кому там нужно 5 В на выход? Ниже я расскажу, как их получить
Output open-drain – выход с открытым стоком. Функционально аналогичен выходу с открытым коллектором. При низком логическом уровне замыкает вывод на землю, при высоком – бросает в воздухе.
Output push-pull – обычный активный выход. При низком логическом уровне напряжение на выводе равно 0, при высоком – напряжение близко к напряжению питания микроконтроллера, обычно + 3 В.
9. Что такое триггер Шмидта.
Триггер Шмитта — это устройство, которое приводит плавающий аналоговый сигнал к стабильным логическим значениям. Для этого в триггере существуют определённые пороги срабатывания по напряжению: ≈2,5 В для восходящего и ≈1,6 В для нисходящего сигнала амплитудой 5 В.
Когда сигнал проходит верхний или нижний порог в попутном направлении, на выходе триггера появляется соответствующий логический сигнал, который стабильно сохраняется до следующего переключения. В частности, для инвертирующего триггера преодоление верхнего порога выдаёт логический ноль, а преодоление нижнего — логическую единицу.
10. Как определить нажатие кнопки.
Нажатие кнопки можно определить по изменению состояния пина GPIO, который подключен к кнопке, например, по переходу с высокого уровня на низкий.
11. Какие источники таковых импульсов могут быть и в чем их преимущества и недостатки.
Внутренние осцилляторы HSI
Микроконтроллеры обычно поставляются с внутренним резистивно-емкостным осциллятором для генерации базового тактового сигнала и схемой фазовой синхронизации для выполнения функции умножения частоты. Проблема с использованием внутреннего осциллятора заключается в том, что он обеспечивает гораздо меньший уровень точности, чем внешние осцилляторы, и имеет малую стабильность частоты. Он находится внутри микросхемы микроконтроллера. Это по определению не является идеальным местом для размещения любой резистивно-емкостной цепи. Это связано с высокой температурной зависимостью таких цепей и широкими допусками для внутренних компонентов. Как правило, микроконтроллер с качественным терморегулированием может передавать тактовый сигнал с точностью в диапазоне от 1 до 5 %. Такого уровня точности может быть достаточно для некоторых медленных шин асинхронной связи и для управления обработкой низкочастотных аналоговых сигналов. Тем не менее в большинстве типичных случаев на практике уровень точности будет слишком низким.
Внешние осцилляторы HSE
Источники тактовых импульсов для микроконтроллеров могут быть двух основных типов: механические резонансные устройства, включая кварцевые кристаллы и керамические резонаторы, а также пассивные резистивно-емкостные осцилляторы.
Наиболее простой формой осциллятора является резистивно-емкостная цепь, эмулирующая схему внутреннего осциллятора, но использующая компоненты с более высоким уровнем точности, а также методы терморегулирования для изоляции компонентов от тепла, выделяемого тактовым генератором микроконтроллера и любыми другими горячими элементами схемы. Хотя это может повысить уровень точности, по крайней мере на порядок, такой вариант, безусловно, будет наименее точным для внешнего осциллятора. В качестве вариантов с приблизительно аналогичными стоимостью и размером занимаемой площади доступны более качественные решения. Тактовые импульсы, генерируемые резистивно-емкостной цепью, также будут подвержены колебаниям уровня напряжения питания и восприимчивы к электрическим помехам, что ограничивает возможность их применения в большинстве ситуаций на практике.
Кварцевые осцилляторы являются наиболее распространенным типом внешних осцилляторов, где требуется прецизионный тактовый сигнал. Кристалл кварца и поддерживающая схема обеспечивают отличный уровень стабильности и точности. Типичный недорогой кварцевый осциллятор может иметь точность свыше одной миллионной доли процента. Этого более чем достаточно для всех вариантов применения, кроме задач, связанных с предельной временной точностью. Однако на кристалл кварца могут влиять факторы окружающей среды, которые могут потребовать реализации дополнительной защиты. Поддерживающая схема для кварцевого кристалла также может приводить к появлению высокого выходного импеданса, из-за которого будет необходимо обеспечивать дополнительное согласование импеданса для интеграции с остальной частью схемы. Использование готового модуля кварцевого осциллятора вместо дискретных компонентов может снизить подверженность воздействию окружающей среды и упростить конструкцию платы, если это позволяет бюджет. Обычно такие модули обеспечивают генерацию прямоугольных импульсов с низким импедансом, что упрощает интеграцию с остальной частью схемы с уровнем точности, сопоставимым с использованием отдельного кристалла кварца.
Альтернативным вариантом является кремниевый осциллятор на основе ИС резонатора, который прост в реализации и обеспечивает уровень точности около 0,05 %. Он немного лучше, чем внешняя резистивно-емкостная цепь, но далеко не так хорош, как кварцевый осциллятор. Однако кремниевые осцилляторы более прочны и надежны, чем кварцевые, и идеально подходят для условий эксплуатации, в которых устройство может подвергаться сильным механическим вибрациям.
Наконец, существуют керамические резонаторы, которые не настолько точны, как кварцевые осцилляторы, но имеют более высокую точность, чем кремниевые осцилляторы. Реализованные на пьезоэлектрическом керамическом материале, они используют резонансные механические колебания для генерации тактового сигнала. Их главное преимущество заключается в том, что они поставляются в виде простого интегрированного корпуса и занимают меньше места, чем кварцевый осциллятор и его дополнительные компоненты. Однако, как и кристаллические осцилляторы, они чувствительны к воздействию факторов окружающей среды, к которым относятся температура, влажность, вибрации и электрические помехи.
12. Как получить тактовой сигнал с частотой ниже входной.
• Для получения тактового сигнала с частотой ниже входной можно использовать делитель частоты.
frequince devider
13. Как получить тактовой сигнал с частотой выше входной.
Для получения тактового сигнала с частотой выше входной можно использовать схемы умножения частоты или фазовые автоподстройки частоты (PLL).
14. Сколько периферийных шин у микроконтроллеров серии f4.
две
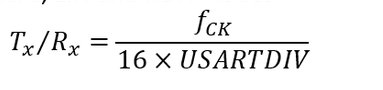
15. Как рассчитывать значение для регистра BRR у UART.
делим частоту шины на баудрате . Частоту передачи данных
16. Как расшифровывается UART?
• UART расшифровывается как Universal Asynchronous Receiver-Transmitter.
USART - s - synchronized
Как происходит передача данных при помощи UART?
• Передача данных через UART осуществляется асинхронно, где данные передаются бит за битом с определенной скоростью (baud rate) и включают стартовый бит, данные, опционально — бит четности и стоповые биты.
18. Какого размера регистр DR у UART, сколько бит передаётся за один раз.
8 бит размер
за раз по биту
19. Какая периферия МК отвечает за работу с прерываниями?
NVIC
При возникновении, некоторого события контроллер прерываний автоматически прерывает выполнение основной программы, и вызывает соответствующую функцию обработки прерываний. После выхода из функции обработчика прерываний программа продолжает выполнение с того места, где произошло прерывание. Все происходит автоматически (при правильной настройке NVIC, но об этом ниже).
Из самого названия видно, что контроллер NVIC поддерживает вложенность прерываний и приоритеты. Каждому прерыванию при настройке NVIC присваивается свой приоритет. Если во время обработки низкоприоритетного прерывания возникает высокоприоритетное, то оно, в свою очередь, прервет обработчик низкоприоритетного прерывания.
При инициации прерывания NVIC переключает ядро в режим обработки прерывания. После перехода в режим обработки прерывания регистры ядра помещаются в стек. Непосредственно во время записи значения регистров в стек осуществляется выборка начального адреса функции обработки прерывания.
В стек перемещается регистр регистр статуса программы ( Program Status Register (PSR)), счетчик программы (Program Counter (PC)) и регистр связи (Link Register (LR) ). Описание регистров ядра приведено в Cortex-M4 Generic User Guide. Благодаря этому, запоминается состояние, в котором находилось ядро перед переходом в режим обработки прерываний.
Также сохраняются регистры R0 — R3 и R12. Эти регистры используются в инструкциях для передачи параметров, поэтому, помещение в стек делает возможным их использование в функции обработки прерывания, а R12 часто выступает в роли рабочего регистра программы.
По завершении обработки прерывания все действия выполнятся в обратном порядке: извлекается содержимое стека и, параллельно с этим, осуществляется выборка адреса возврата.
С момента инициации прерывания до выполнения первой команды обработчика прерывний проходит 12 тактов, такое же время необходимо для возобновления основной программы после завершения обработки прерывания.
20. Как будут обрабатывать 2 события произошедшие в один момент и вызывающие прерывания.
Зависит от их приоритета. Если у кого-то высший приоритет он первый. Если одинаковые, то по очереди. Они всеравно иделаьно в один момент не придут.
21. Как настроить МК, что бы он обрабатывал события в прерывании.
Чтобы настроить МК для обработки событий в прерывании, необходимо включить соответствующие прерывания в контроллере прерываний и назначить обработчики прерываний для этих событий.
напримере NVIC_EnabeIRQ(USART2_IRQn);
USART@_IRQHandler()
22.22. Какое устройство лежит в основе таймера.
счётчик по возрастающему фронту.
23. Как рассчитать частоту события, контролируемое таймером.
24. Какие прерывания могут быть у UART.
Прерывания UART могут включать прерывание передачи данных (TX), прерывание приема данных (RX), прерывание ошибок (например, переполнение буфера или ошибка четности)
25. Прерывания таймера
Прерывания таймера могут включать прерывание по переполнению счетчика, сравнения значений (например, при достижении заданного значения)