
Зарождение землеройной техники – первые проекты Леонардо да Винчи.
История экскаваторов берет свое начало в XV веке, когда в 1420 году в венецианском издании «Кодекса Джованни Фонтана» была опубликована информация о ковшедолбежной землечерпалке. Это устройство применялось для углубления дна каналов и расширения морских гаваней. Однако создание полноценной землеройной техники связывают с Леонардо да Винчи, который в начале XVI века разработал схемы экскаваторов-драглайнов. К 1500 году он также набросал чертежи грейфера для землечерпалки. Во время прокладки каналов в засушливой Миланской долине он использовал землечерпалку собственной конструкции, что можно считать одной из первых попыток механизации земляных работ.
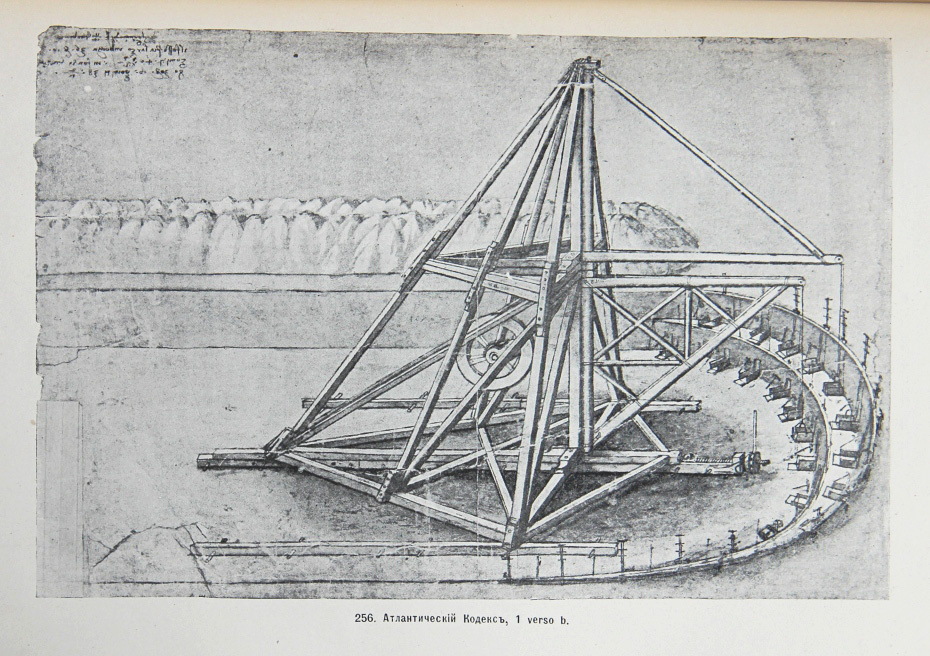
Одним из первых детальных описаний экскаватора можно назвать зарисовки Леонардо да Винчи, где он представил ковш-драглайн, имеющий заостренные края и сито для удаления воды. Ковш подвешивался на канатах, а разгрузка осуществлялась с помощью откидывающегося дна. Хотя сегодня такие ковши не используются, сам принцип разгрузки нашел применение в современных экскаваторах с прямой лопатой.
Ранние механизмы – плавучие землечерпалки и экскаваторы XVIII-XIX веков.
В 1597 году в Венеции механик Буанаюто Лорини сконструировал и построил плавучую землечерпалку, предназначенную для очистки каналов. В 1718 году механики де ла Бальм и Белидор представили землеройное устройство с двумя ковшами, использовавшееся в портах Тулона и Бреста. В 1795 году Роберт Фултон разработал первый грейдер-элеватор, однако его испытания состоялись только через 70 лет в США. Эти изобретения позволили значительно повысить производительность и точность работ, что привело к дальнейшему совершенствованию техники.
Индустриальный прорыв – паровые, электрические и гусеничные экскаваторы.
Первая ковшовая драга с паровым приводом была использована в английском порту Сандерленд в 1796 году. Она могла добывать до полутора тонн грунта за один рабочий ход, что значительно превышало производительность ручного труда. В 1860 году французский инженер М. Кувре создал сухопутный многоковшовый экскаватор с цепным приводом, который был задействован на строительстве Суэцкого канала. Данный механизм позволил сократить сроки выполнения земляных работ и увеличить объемы перемещаемого грунта, что стало значительным прорывом в строительстве крупных инфраструктурных объектов.
В начале XX века произошел стремительный прогресс в экскаваторостроении. В 1905 году немецкая компания "Оренштейн & Коппель" выпустила первые полностью поворотные экскаваторы с паровым приводом, обладающие возможностью вращения платформы на 360 градусов, что значительно увеличивало их маневренность и эффективность на строительных и горнодобывающих объектах с ковшами объемом до 4 кубометров. В 1910 году появились электрические экскаваторы, а американская компания "Бюсайрус" разработала первую гусеничную модель. В 1912 году был создан экскаватор с двигателем внутреннего сгорания. Эти новшества сделали экскаваторы более мобильными, мощными и экономичными, что способствовало их широкому распространению в строительной отрасли и горнодобывающей промышленности.
Развитие экскаваторов в России – от первых конструкций до массового производства.
В России также были предприняты попытки создания землеройной техники. В 1809 году в Петербургском институте путей сообщения разработали первую плавучую землечерпалку мощностью 15 лошадиных сил. В 1847 году русский изобретатель Кушелевский предложил универсальную землечерпательную машину, способную работать как на воде, так и на суше. В 1854 году в Пермской губернии появился первый русский паровой экскаватор, который использовался в горной промышленности. Массовое производство экскаваторов в России началось в 1901 году на Путиловском заводе, что позволило ускорить реализацию крупных инфраструктурных проектов в стране.
В 1931 году в СССР была запущена программа по выпуску экскаваторов, и уже к 1947 году Уральский завод тяжелого машиностроения (УЗТМ) наладил серийное производство карьерных машин с ковшами емкостью 3-5 кубометров. В 1958 году был создан шагающий экскаватор-драглайн с ковшом на 25 кубометров, а в 1965 году - экскаватор-лопата с ковшом на 35 кубометров для работы в твердых грунтах. В 1975 году УЗТМ представил крупнейший на тот момент шагающий драглайн с ковшом объемом 100 кубометров и стрелой длиной 100 метров. В 1976 году завод освоил выпуск мощных карьерных лопат с ковшами объемом 20 кубометров, что позволило значительно увеличить эффективность добычи полезных ископаемых.
Современные экскаваторы оснащены гидравлическими системами и могут передвигаться на колесах, гусеницах или даже "шагать" с помощью специальных опор. Важным этапом в развитии экскаваторов стало применение гусеничного хода. Его идея была предложена еще в 1879 году русским крестьянином Федором Блиновым, который разработал "вагон с бесконечными рельсами" – прообраз современного гусеничного трактора. С начала XX века гусеничный ход стал основой для многих видов землеройных машин. Первые гусеничные экскаваторы изготавливались с деревянными стрелами и траками, однако вскоре их заменили металлические конструкции. Один из первых таких экскаваторов был использован в 1912 году на строительстве канала Кэлуметсэг в США.
Современные технологии – гидравлика, автоматизация и умные системы.
Сегодня экскаваторы используются в строительстве, горнодобывающей промышленности, дорожном строительстве и других отраслях. Они оснащены передовыми технологиями, включая автоматические системы управления, GPS-навигацию и возможности удаленного мониторинга. Развитие гидравлических и электронных систем сделало современные экскаваторы универсальными машинами, способными работать в самых сложных условиях. Новейшие модели экскаваторов обладают высокой точностью управления, сниженным расходом топлива и улучшенной эргономикой кабины оператора. Также активно разрабатываются электрические и гибридные модели, направленные на снижение вредных выбросов и повышение энергоэффективности.
Будущее экскаваторов – искусственный интеллект и автономные машины
В будущем экскаваторы продолжат эволюционировать, становясь еще более интеллектуальными и автономными. Современные технологии позволяют интегрировать искусственный интеллект и роботизированные системы в управление техникой, что повысит ее производительность и снизит затраты на эксплуатацию. Автоматизация строительных процессов, дистанционное управление и использование дронов для анализа местности – лишь часть перспективных направлений, которые определят развитие экскаваторов в XXI веке.