Для различных точных систем, где требуется позиционирование рабочего элемента, манипуляторов и роботов существуют специальные готовые решения. И одно из них это PAC-ПЛК с CoDeSyS на борту.
Приветствую всех читателей, с вами на связи автор блога, Семен.
Эта статья будет посвящена готовой библиотеке под названием Soft Motion в дистрибутиве CoDeSyS. Как обычно стараюсь писать по существу, без всякой воды.
Если есть вопросы\предложения\жалобы можете писать в телеграмм "Ты же инженер АСУ ТП".
Будем считать, что у вас установлен дистрибутив CODESYS V3.5 SP16 Patch 7.
Установка устройств для работы с ними (Таргеты)
В данном примере я использую ПЛК VECTOR CPR-VEC-CEC-C1/
На борту у него уже установлен Soft Motion Basic. Можно считать что это готовое устройство, которое сразу работает с сервоприводами. Использовать мы будем протокол EtherCat.
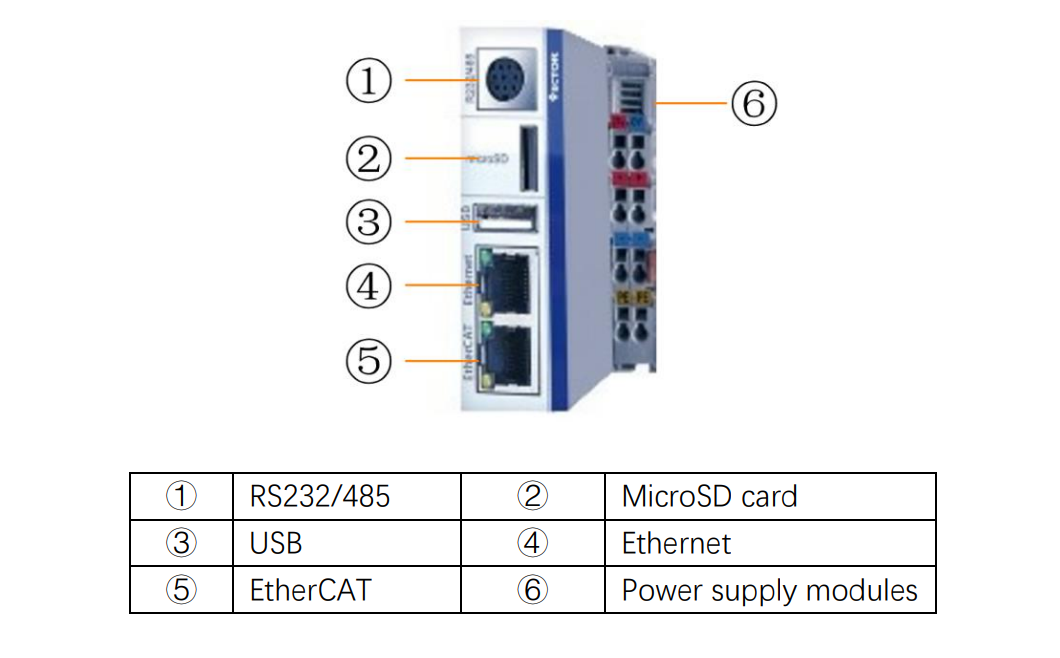
Мне нужно подключить к этому устройству два модуля ввода\вывода по встроенной шине, один модуль ввода\вывода по внешней шине и два сервопривода.
Залазим в инструмент репозиторий устройств.
Жмем Установить.
Конфиги можно скачать с официального сайта поставщика. У меня они были поэтому устанавливаем их. Нужно указать XML-файл конфигурации.
Устанавливаем все необходимые нам модули.
Это файл-конфигурация сервопривода. Нужно указать XML-файл конфигурации EtherCat.
Это файлы конфигурации внутренних модулей по шине.
Начальный запуск в CoDeSyS.
Затем создаем Стандартный проект. И запускаемся.
Выбираем Vector ARM.
Если нет библиотек Soft Motion, подгружаем их.
После этого можно пробовать загружать устройства. О них напишем позже.
Результаты запущенного ПЛК.
На этом я заканчиваю, пока-пока.