В. Лавр
В данном проекте мы будем осуществлять передачу и прием цифровых данных посредством использования 433 МГц передатчика и приемника, основанных на модулях Linx. Если кто-то из начинающих радиолюбителей, прочитав о таких «страшных» частотах, вдруг почувствовал скуку, представляя себе сложнейшую схему, позвольте заметить, что данная схема является одной из самых простых. На самом деле, собрать её значительно легче, чем, скажем, усилитель на TDA2003.
На следующих рисунках будет представлена первая часть проекта, которая включает в себя сборку модулей на печатных платах и создание высокочастотной связи между ними. Эта работа не требует глубоких знаний в области радиотехники, и её освоение возможно даже для начинающих. Мы подробно рассмотрим каждый этап, чтобы передача и прием данных стали доступными и понятными для всех желающих. Спешите ознакомиться с подробностями и трудностями, которые могут возникнуть в процессе реализации нашего проекта.
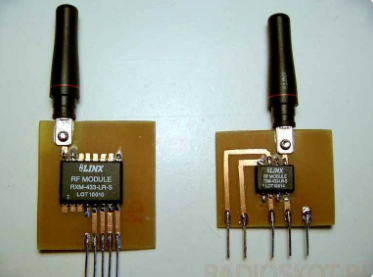
Модули Linx представляют собой гибридные микросхемы, смонтированные на компактных платах, которые предназначены для поверхностного монтажа на основной более крупной плате. Это конструктивное решение обеспечивает высокую степень интеграции и упрощает процесс установки.
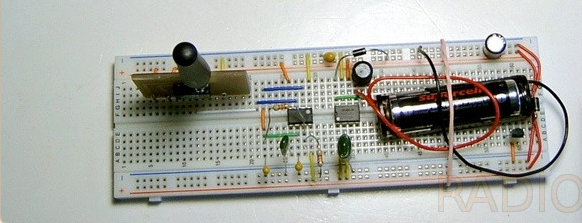
Важным элементом является ВЧ-часть, которая изготавливается на отдельной печатной плате. Остальные компоненты схемы, используемые для испытаний и наладки, могут функционировать на любом макетном устройстве. Такой подход позволяет проводить тестирование и отладку в различных условиях, что является важным аспектом при разработке и внедрении сложных радиоэлектронных систем.
Таким образом, модули Linx являются универсальным решением, способствующим созданию эффективных и компактных радиокомпонентов, что значительно упрощает их интеграцию в более сложные системы. Теперь разработчики могут сосредоточиться на улучшении функциональности и производительности своих устройств.
Передающая часть устройства состоит из мультивибратора, основанного на таймере 555, который генерирует импульсы с периодом 1 секунда. Эти импульсы являются основным сигналом, передаваемым устройством. Питание передатчика осуществляется от одной батареи типа AA, дополняемой DC/DC преобразователем MAX756, который работает в повышающем режиме. Это преобразователь преобразует напряжение батареи 1, 5 В в 3, 3 В, что является необходимым для функционирования передатчика.
Следует отметить, что можно избежать усложнений и сразу подать на передатчик требуемое напряжение. В то же время, приемник, работающий на основе двух батареек по 1, 5 В, принимает импульсы, посылаемые передатчиком. В результате этой передачи загорается светодиод, что указывает на успешное получение сигнала.
Таким образом, это простое устройство представляет собой наш первый тест с радиочастотным каналом, демонстрируя основы передачи данных. Более подробно с данным проектом можно ознакомиться по следующей ссылке: https: //radioskot.ru/publ/nachinajushhim/peredacha_cifrovykh_dannykh_po_radiokanalu/5-1-0-1029. Схема передатчика и приёмника Оборудование с такой схемой обеспечивает стабильный прием сигналов на 100 метров с помощью передатчика, расположенного в доме.
Разработка коммуникационного протокола представляет собой важный этап в обеспечении надежной передачи данных. В рассматриваемом эксперименте возникла проблема: радиочастотный канал был насыщен посторонними сигналами, что привело к нежелательному приему данных даже при отключенном передающем модуле (TX). Следовательно, стояла задача создания метода, позволяющего различать наши сигналы от посторонних.
Для решения этой проблемы мы предложили использовать сигналы различной длительности, которые обозначали передачи «0» и «1». Установив период в 250 микросекунд для последовательной передачи данных, мы выбрали определенные временные интервалы: сигналы «0» устанавливали на 150 микросекунд, а «1» — на 200 микросекунд. Таким образом, передача одного байта, инициируемая TX модулем, предваряется 400 микросекундами синхронизирующего импульса.
Эти эксперименты продемонстрировали эффективность нашего подхода. Пример передачи байта «00110100» иллюстрируется осциллограммой, что позволяет визуально оценить успешность разработки.
Программа для TX модуля, реализованная на языке PIC, представляет собой важный компонент в мире радиосвязи. Она начинается с небольшой задержки, приблизительно в две секунды, которая необходима для устранения риска случайной передачи данных сразу после включения питания. Данная задержка служит защитным механизмом, обеспечивающим корректную инициализацию системы.
TX модуль функционирует благодаря одной батарее типа АА. Интересно, что напряжение, подаваемое на модуль, повышается до 3.3 В с использованием микросхемы MAX756. Эта микросхема является ключевым элементом системы, так как она обеспечивает стабильное и необходимое напряжение для работы модуля.
Таким образом, программа и схемотехника в целом создают наилучшие условия для передачи данных. Обеспечение надежного питания, а также грамотная организация структуры программы позволяют минимизировать вероятность сбоев и обеспечить высокую стабильность работы системы.
Передающая часть
Приемник в данном контексте представляет собой компонент с несколько более сложной архитектурой. Он функционирует на основе микросхемы MAX756, которая преобразует напряжение, получаемое от стандартных 1, 5 В AA батарей, в более высокое – 5 В.
На резисторе номиналом 330 Ом напряжение снижается до 3 В. В теории, существует возможность настройки MAX756 в режим 3, 3 В, однако в данном случае требуется именно 5 В. Это значение критично для обеспечения питания других устройств, подключенных к модулю приемника.
Таким образом, правильный выбор напряжения и компонентов становится ключевым фактором в проектировании эффективной и устойчивой схемы, обеспечивающей надежную работу всей системы. Этот аспекты следует учитывать при проведении дальнейших экспериментов и разработок в области радиоканальных технологий.
Приёмная часть
Приемная программа реализована как конечный автомат, состоящий из двух состояний. Стартовым состоянием является State0, в котором осуществляется ожидание синхронизации импульсов. На первоначальном этапе компаратор PIC указывает на вероятность передачи. В этом контексте измеряется длина полученного импульса. Если её значение оказывается значительно ниже установленного порога, такой импульс игнорируется, и система остается в State0 в ожидании следующего сигнала. Пороговое значение выбирается экспериментальным путем и оптимизировано для данной системы.
При получении необходимого синхроимпульса происходит переход к State1. В этом состоянии система получает 8 бит и компонуёт их в байт. Ключевым условием для перехода является достаточная продолжительность синхронизирующего сигнала. После измерения длины импульса осуществляется его сравнение с порогом. Если импульс не достигает необходимого уровня, он удаляется, и система возвращается в State0. Если же он в пределах нормы, проводится проверка его длительности для различения между 0 и 1. Результирующий бит сохраняется в регистре статуса, а с помощью сдвига влево он добавляется в байт.
По завершении приема 8 бит система возвращается к State0, что запускает процесс заново. Для подтверждения правильности полученного байта активируется светодиод, который мигает соответствующее количество раз (в текущей настройке – 4 раза). После этого происходит пауза в 2 секунды, и система вновь переходит в State0, ожидая следующую передачу байта.
Реализация десятиимпульсного кодирования данных — это как открытие новой звезды в обширном космосе коммуникационных протоколов. Наши недавние исследования стали навигатором по неизведанным водам, выявляя, что этот метод не только продвигает технологии, но и значительно снижает энергопотребление передатчика.
Система десятиимпульсного кодирования использует короткие интервалы, разделяющие импульсы, как мосты, соединяющие двоичные ценности — нули и единицы в байте. Этот творческий подход позволяет передатчику генерировать сигналы лишь в моменты импульсов, что усиливает срок службы батареи, словно наполняя ее новой жизнью.
К тому же, способность приемника автоматически адаптироваться к скорости передачи данных — это как радужный мост, который соединяет стабильность и гибкость. В нашем эксперименте мы использовали прототип программы, созданный признанной компанией, ранее трудившейся над подобными проектами. Примененные схемы гармонично перекликались с прошлыми исследованиями, используя двухпроводной интерфейс для ЖК-модуля, что облегчало отладку.
В процессе передачи данных передатчик отправляет текстовую строку, как заветное послание, при нажатии кнопки, и эта строка отображается на дисплее приемника. Это ярко свидетельствует о надежности и эффективности предложенного подхода, открывая новые горизонты в мире общения. Схемы TXM и RXM
Ключевым аспектом нашего исследования является выбор ширины импульса, который следует применять в процессе передачи данных. На основе обширных экспериментов мы пришли к оптимальному значению в 100 мкс, что, в свою очередь, соответствует скорости передачи около 5 кБит/сек. Это значение находится в пределах максимальной скорости в 10 кБит/с, которую способен поддерживать наш модуль передатчика.
При этом необходимо отметить, что сокращение длительности импульса вдвое не приводит к улучшению качества приема, а, наоборот, ухудшает его. В диапазоне частот 433 МГц мы сталкиваемся с довольно значительными шумами, проявляющимися в виде случайных импульсов, что усложняет процесс приема. Последующее уменьшение ширины импульса делает задачу различения сигнала от шумов практически невыполнимой.
В результате проведенной работы мы достигли удачного компромисса между обеспечением высокой чувствительности приемника и эффективной фильтрацией шумов, что, безусловно, является важным достижением в нашем исследовании.
Программа для передатчика начинает свою работу с активации устройства по нажатию кнопки. В этом процессе передатчик выходит из спящего режима и возвращается в него по завершении передачи данных. Данная схема значительно уменьшает энергопотребление устройства, что является критически важным фактором для многих дистанционно управляемых систем.
Текущие настройки передачи предусматривают различные временные зазоры между импульсами, соответствующие символам 0 и 1: 810 мс и 1890 мс соответственно, при этом стандартный временной зазор равен 1350 мс. Такой подход создает диапазон времени для передачи одного байта, который варьируется от 7.8 до 15.1 мс. Это, в свою очередь, приводит к скорости передачи данных, равной примерно 66–128 байт в секунду.
Учитывая эти параметры, объем передачи данных оказывается более чем достаточным для большинства современных дистанционно управляемых устройств. Таким образом, реализуемая технология обеспечивает надежное и эффективное функционирование системы передачи данных. Радиолиния была проверена путем размещения блоков в помещениях, расположенных на разных этажах частного дома с расстоянием 50 метров. Прием испытательного сигнала был стабильный и без ошибок.
Одноканальный пульт дистанционного управления представляет собой важный компонент в системах управления, обеспечивающий функциональность в условиях различных помех. В данной работе мы рассмотрим реализацию управления с использованием одного канала. Для этого мы настраиваем передатчик на генерацию симметричных квадратных импульсов, период которых может регулироваться с помощью переменного резистора.
Данный резистор подключен к входу АЦП микроконтроллера PIC, что позволяет осуществлять преобразование напряжения в параметр задержки. Следует отметить, что период модулирующего сигнала можно установить с шагом в 100 мс, начиная от 500 мс и заканчивая 26 мс, что соответствует диапазону модулирующих частот от 2000 Гц до 30 Гц.
Эта настройка предоставляет возможность получения высококачественного сигнала управления, даже в условиях существующих помех. Таким образом, реализованная схема может служить основой для более сложных систем, где требуется надежная и эффективная передача данных. Схема передатчика на одну команду
Приемник совершает важную функцию, позволяя пользователю регулировать чувствительность приема сигнала и настраивать устройство на конкретную частоту модуляции. В своей работе он использует аналоговый выход, напряжение которого прямо пропорционально уровню поступающего сигнала. В отсутствие сигнала постоянное напряжение на выходе составляет приблизительно 1.1 В. Это напряжение подается на неинвертирующий вход встроенного в микроконтроллер компаратора.
Инвертирующий вход компаратора соединен с правым переменником, который играет ключевую роль в определении чувствительности системы. Напряжение на инвертирующем входе должно быть несколько выше, чем на неинвертирующем, что позволяет достигать необходимой чувствительности.
Измерение продолжительности импульсов на выходе компаратора осуществляется в единицах, значение которых задается левым подстроечником, соединенным с аналогово-цифровым преобразователем (АЦП). Таким образом, вся система может точно настраиваться на определённую частоту модуляции, исключая реакции на другие частоты. В результате приемник функционирует как частотный селективный фильтр, чей диапазон может изменяться с помощью переменного резистора. Схема приёмника на одну команду При настройке системы сначала выбирает частоту модуляции в передатчике. После этого настраивают приемник, медленно вращая переменник влево. Обе ручки должны быть в примерно одинаковом положении для синхронизации.