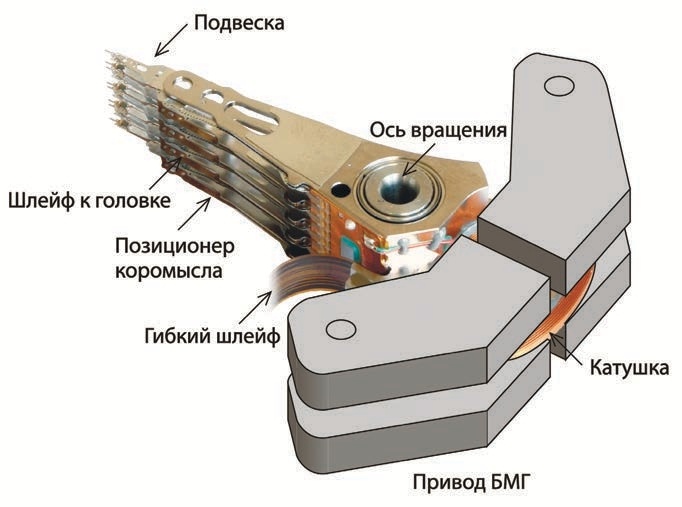
Блок головок представляет собой «вилку», на концах которой закреплены слайдеры головок.
К слайдерам головок поступают электрические сигналы по гибким шлейфам (на рисунке 10 обозначены как «шлейф к головке»), идущим к микросхеме головок. Микросхема соединена с платой электроники жесткого диска при помощи гибкого шлейфа и разъема. Функция этой микросхемы усиливать сигналы, приходящие от элементов чтения головок, формировать импульсы записи для элементов записи головок и переключать выбранную в данный момент головку. В один момент времени может работать только одна головка.
Для фиксации блока головок в неработающем состоянии (в зоне парковки) используются специальные защелки. Наибольшее распространение получили два типа таких защелок: магнитные и воздушные. В современных накопителях используется только воздушная защелка. Она фиксирует блок головок на парковочном стапеле, не давая ему выскочить на рабочую поверхность. С началом вращения магнитных дисков создаваемый воздушный поток отклоняет «парус» воздушной защелки и разблокирует систему позиционирования.
Существует два типа привода звуковой катушки: линейный и поворотный. Во всех дисках используется поворотный (на рисунке). Линейный мы опишем для наглядности демонстрации понятия micro-JOG.
В линейном приводе катушка намотана вокруг центрального ярма, расположенного между двумя постоянными магнитами. Катушка, находясь под напряжением, может свободно двигаться вперед и назад. В результате, рычаг привода, прикрепленный к конструкции катушки, перемещается внутрь и наружу ярма. VCM жестко крепятся к базе гермоблока за пределами области диска, а перемещение рычага происходит вдоль радиуса диска (на рисунке).
При таком расположении ориентация слайдера относительно дорожки остается одинаковой при всех радиальных положениях слайдера.
В поворотном приводе звуковой катушки рычаг привода поворачивается в точке между конструкцией катушки и рычагом подвески. Катушка крепится с помощью эпоксидного клея на одном конце рычага, а слайдеры на подвесках/пружинах на другом конце. Точка поворота/ось вращения находится ближе к катушке, которая подвешена в магнитном поле постоянных магнитов. Сила появляется всякий раз, когда на катушку подается напряжение. Эта сила заставляет катушку двигаться так, что она поворачивается вокруг оси вращения и заставляет слайдеры двигаться по дуге. Угол между ориентацией слайдера и дорожкой снизу изменяется в зависимости от радиального положения дорожки (на рисунке).
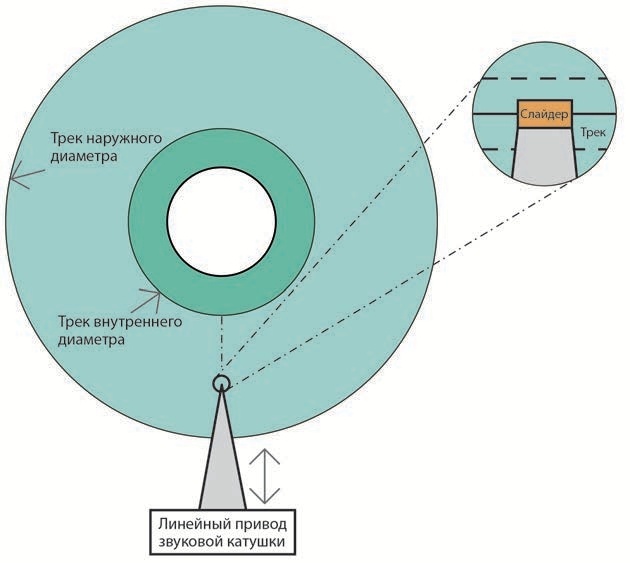
Для считывания и записи данных используются два разных элемента, расположенных на одном слайдере. Элемент записи представляет из себя микроскопическую индуктивную катушку, тогда как считывающий элемент является магниторезистивным датчиком (ниже конструкция будет рассмотрена детально). В результате всегда существует расстояние между датчиком чтения и элементом записи. Через элемент чтения, также определяются серво-шаблоны из серво- секторов, которые используются для получения сигнала обратной связи по положению. Таким образом, считывающий элемент используется в качестве датчика положения, для того, чтобы сервомеханизм расположил его в нужном месте при операции чтения. Во время же операции записи, обратная связь по положению, также поступает от датчика чтения. Если зазор между считывающим и записывающим элементами известен, то эта информация может приниматься во внимание как смещение при регулировании положения пишущего элемента. Это смещение называется расстоянием micro-JOG. При использовании поворотного привода расстояние micro- JOG отличается для разных радиальных положений слайдера, что показано на рисунке.
На этом рисунке показана головка слайдера, расположенная поворотным приводом на двух разных дорожках, Trkm и Trkn. Поскольку слайдер движется по дуге, расстояния micro-JOG для этих двух мест (dm и dn) различны, а именно dm < dn для иллюстрации, показанной на рисунке выше. В этом случае сервомеханизм позиционирования головки должен использовать зависимое от трека расстояние micro-JOG для компенсации смещения. Многие факторы, такие как геометрия головки, расстояние между осью привода и центром шпинделя, влияют на расстояние micro-JOG и его изменение в зависимости от радиуса. Расстояние micro-JOG должно быть откалибровано как функция радиуса диска для каждого HDD, с использованием функции, встроенной в прошивку инициализации на заводе.
Если головка позиционируется на центральной дорожке диска, то элемент чтения и элемент записи попадают на один и тот же трек. Именно по этой причине во многих жестких дисках служебная зона размещена на средних треках диска.
Довольно часто несоответствие настройки micro-JOG реальному положению элементов чтения/записи приводит к промахам записи и образованию так называемых «программных BAD-секторов». Особенность таких секторов в том, что если настройка micro-JOG станет снова верной (например, из-за того, что жесткий диск остыл после перегрева или наоборот), то запись данных в такой не читающийся сектор сделает его снова нормальным.
Для удержания трека необходимо постоянно корректировать положение головки, так как она постоянно убегает из-за вибраций. В механике жесткого диска применена методика самонастройки, то есть на заводе поверхность размечается так, чтобы происходила компенсация смещений головки, люфта диска, биения диска и других характеристик. При изменении внутренней геометрии, эта самонастройка перестает быть верной. Это приводит к таким последствиям:
- промах при установке на дорожку, что дает либо медленное чтение, либо стук;
- изменение в параметрах головки, например, высоте полета, что дает полную или частичную не читаемость пользовательских данных;
- промах записи: при попытке записи, она производится не в точно указанное место, а со смещением, что приводит к порче либо сектора, который пишется, либо сектора на соседней дорожке.
Из этого вытекает очень важное следствие: жесткий диск с поврежденной механикой обязательно нужно восстанавливать в режиме «только чтение».
Статья подготовлена по материалам ACELab