Предыдущие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
Предыдущие части: Проблемы размещения, Порт приёмника, ELRS, Прошивка контроллера, Запчасти
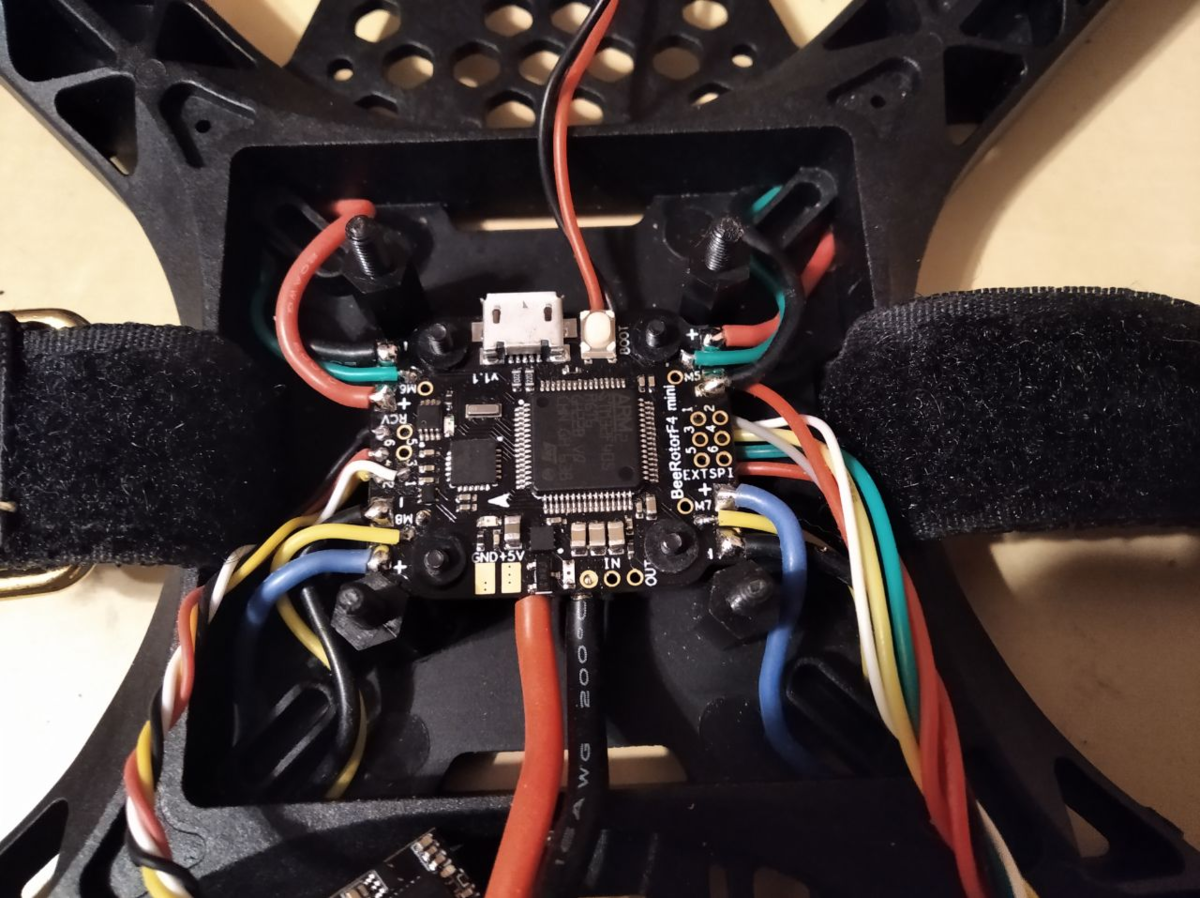
На данный момент я припаял все моторы к регуляторам, а регуляторы к полётному контроллеру. Приёмник тоже припаян, так что можно летать. С обратной стороны полётного контроллера припаял необходимые для дальнейшей постройки провода:
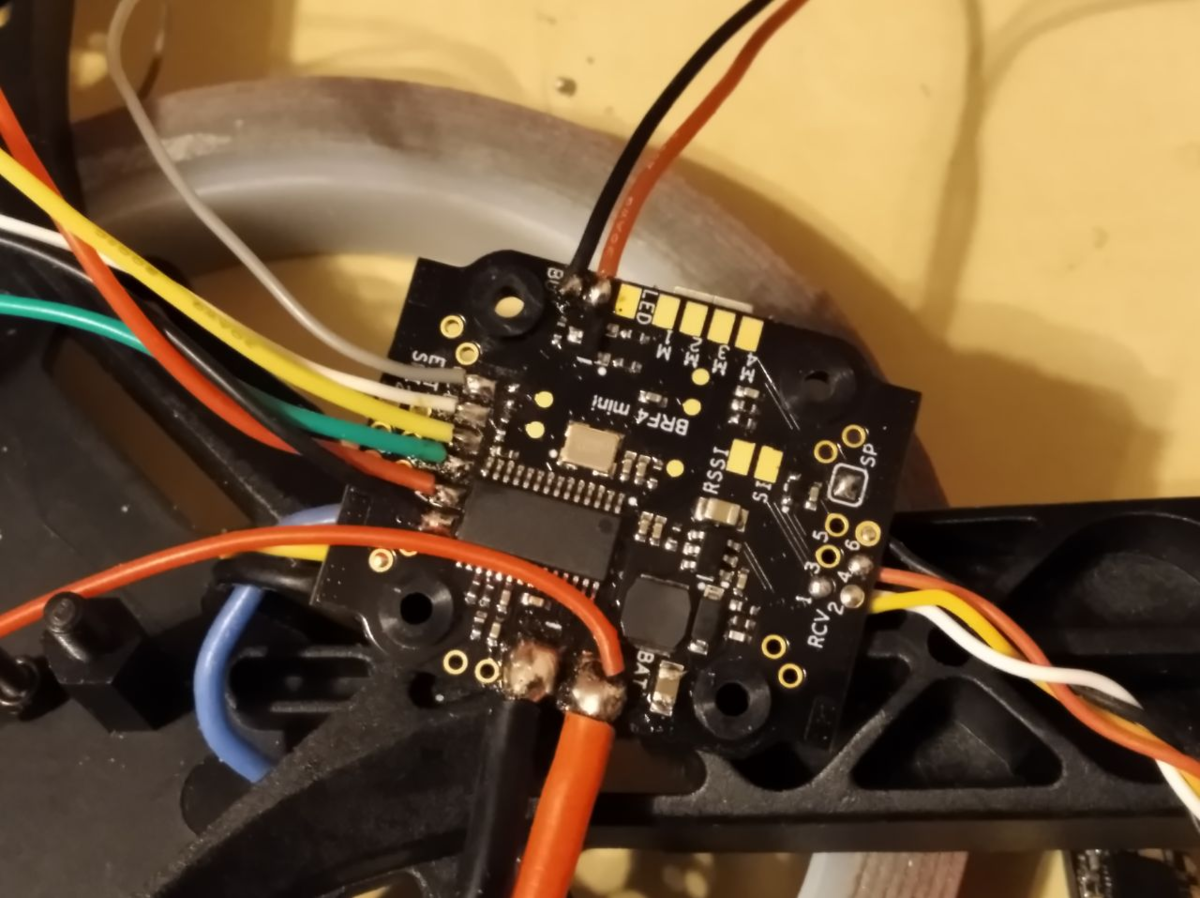
Это UART1, I2C, 5 вольт и земля, а также провода для пищалки, и один провод выведен с плюса батареи (VBAT), т.к. от него будет питаться передатчик, а площадки VBAT больше нигде нет.
Теперь нужно запустить конфигуратор и настроить моторы. Дело в том, что контроллер я поставил боком, а площадки для проводов находятся в углах, и поэтому управляющие провода от каждого регулятора припаялись не к своим контактам.
Летать в таком виде коптер не сможет, так как номера выходов регуляторов не совпадают с номерами моторов. Правильное расположение у них вот такое:
Посмотрим, что можно сделать. Самое простое это конечно припаять провода регуляторов к нужным местам, просто их придётся тянуть дальше, чего я не хочу.
Запомните, что любые действия в конфигураторе нужно делать со снятыми пропеллерами!
Для дальнейших действий к коптеру нужно уже присоединить батарею.
Для начала надо зайти во вкладку Outputs и включить моторные выходы (по умолчанию они выключены).
Затем включить режим тестирования моторов:
Далее нужно (осторожно) двигать ползунки с 1 по 4 и наблюдать, какие моторы крутятся и в какую сторону.
У меня ситуация такая:
- крутится второй мотор, против часовой
- крутится четвёртый, против часовой
- крутится первый, против часовой
- крутится третий, против часовой.
Этот порядок в INAV поменять не получится, но можно пояснить контроллеру, какие моторы где находятся.
Зайду во вкладку Mixer и запущу Mixer Wizard:
Задний правый мотор (1) сейчас находится на выходе 3. Значит, я поставлю там Motor Index №3, и тогда контроллер будет знать, что правый задний мотор управляется выходом №3. Аналогично настрою остальные моторы: 2-1, 3-4, 4-2.
Теперь мне нужно поменять вращение моторов номер 1 и 4 на противоположное. Управляются они выходами 2 и 3.
Нужно выйти из конфигуратора и запустить другую программу – BLHeli Suite. Она предназначена для настройки регуляторов с прошивкой BLHeli и BLHeli_S.
Там тоже есть кнопка Connect. После соединения нужно нажать кнопку Read Setup. В случае успеха программа найдёт 4 регулятора:
Мне нужны 2 и 3. Сначала я выключаю все активные цифры и оставляю только 2:
Выбираю Motor Direction: Reversed (так как изначально стояло Normal), и заодно цвет светодиода:
После этого нажимаю Write Setup, и регулятор №2 обновляется. Аналогично поступаю с регулятором № 3, а также задаю цвет светодиода для остальных.
После этого у меня нужные моторы крутятся в нужные стороны, и есть бортовые навигационные огни.
Ориентация полётного контроллера
На этом ещё не всё. Так как акселерометр находится на полётном контроллере, он тоже развёрнут, и нужно сообщить об этом контроллеру, чтобы ориентация коптера считывалась правильно.
Надо зайти во вкладку Configuration и задать поворот контроллера 270 градусов (это то же самое, что -90):
Здесь также есть поворот для компаса, но он никак не связан с поворотом контроллера и его значение будет подбираться отдельно. То, что сейчас – просто по умолчанию.
Правильность ориентации полётного контроллера можно проверить во вкладке Setup, наклоняя коптер и следя, как себя ведёт 3D-модель:
Уже почти можно лететь, но увы, нужно сделать ещё несколько дел:
- Откалибровать регуляторы
- Откалибровать акселерометр
- Настроить арминг
- Настроить полётные режимы
- Настроить Failsafe
- Настроить PID
Читайте дальше: