Предыдущие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
В ютубах очень много популярных влогеров, которые летают на квадрокоптерах и собирают их.
Но что мне кажется удивительным в их роликах – они собирают, наверно, 10 или 20 квадрокоптеров и каждый раз показывают, как это делать. И каждый раз все это смотрят. Но смотреть это 20 раз нет никакого смысла.
Конечно, каждый раз они выбирают новую раму, новые моторы, новый полётный контроллер и т.д. Может быть, именно поэтому кому-то кажется, что нужно подбирать именно такие детали, и что они будут работать только в таком сочетании.
Конечно же, нет. Вы можете выбрать любую другую раму, любые другие моторы и вообще всё другое. В сборке не изменится вообще ничего.
Я уже описал в предыдущих материалах каждый компонент отдельно, а теперь начну сборку коптера. И обязательно держите в уме, что эта сборка абсолютно не зависит от конкретных деталей. Все коптеры собираются одинаково!
Моя сборка, кстати, будет не очень логичной, потому что, во-первых, некоторые детали у меня просто оказались лишние, а некоторые я докупил исходя из максимальной дешевизны. Тем лучше, так как вы увидите, что собрать коптер можно из чего угодно.
Рама: KK260
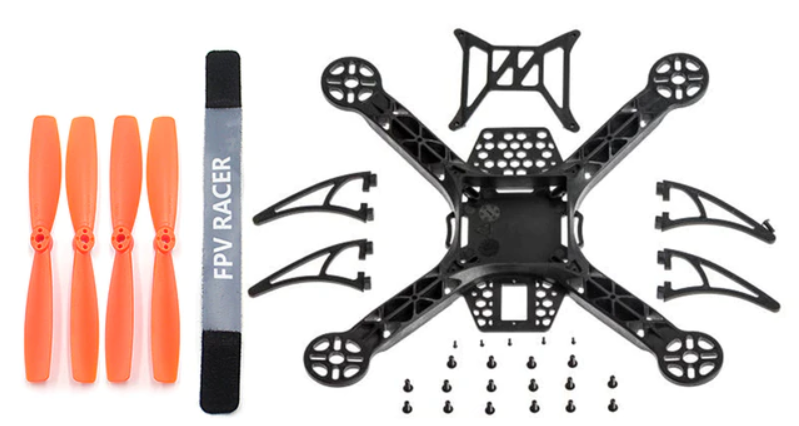
Так как у меня образовался излишек деталей под 6 дюймов, то я решил делать 6-дюймовый коптер, и это самая дешёвая 6-дюймовая рама, которую я нашёл на Али (около 600 р. с доставкой).
Она абсолютно нелепа. Она сделана из пластика, у неё отсутствуют любые намёки на стандартные крепления стека, в общем эта рама – полнейший шлак. Но я взял именно её, во-первых, чтобы героически решать возникающие проблемы, и во-вторых, потому что это самая лёгкая рама на 6 дюймов (110 грамм), остальные тупо тяжелее.
Есть и плюс: пластик не экранирует радиоизлучение, в отличие от карбона, поэтому здесь у меня некоторая свобода в расположении антенн и GPS.
Также хорошо, что бонусом к этой раме идут очень неплохие в плане эффективности пропеллеры. Но я буду использовать ещё лучше.
Моторы: Excelvan 2206 1600KV

Эти моторы валяются у меня уже года два, и на момент покупки тоже были очень дешёвые. Ничего особенного в них нет, и для этой сборки можно брать любые моторы в диапазоне 1806-2207 1500-1800KV. Но крепление моторов 1806 не подойдёт к креплениям этой рамы – они меньше. Так что выбор вот такой.
Я уже знаю их тяговые характеристики с пропеллерами на 6 дюймов. На 3S они дают тягу 200 грамм, потребляя около 3 ампер, а максимальная тяга более 500 грамм и потребление 12 ампер, то есть я могу делать коптер общим взлётным весом до 800 грамм и укладываться в требования к тяге.
На самом деле всё будет более оптимизированно, но это пока грубые прикидки.
Вес мотора: 33 грамма. Общий вес моторов с рамой: 242 грамма.
Регуляторы: Cyclone BLHeli_S 20A
Это также самые дешёвые регуляторы, которые мне удалось найти. 20 ампер покрывают потребности моторов (макс. 12 ампер). Диапазон напряжений 2-4S также подходит.
Замечание из будущего: Я не рекомендую использовать эти регуляторы, так как они внезапно горят без всякой причины.
Я взял отдельные регуляторы, а не 4в1, потому что у рамы широкие лучи и кроме того, в лучах снизу есть специальные выемки для навигационных огней. Но я туда поставлю не огни, а регуляторы.
Они туда идеально помещаются. И БОНУС!!! У регуляторов есть собственные светодиоды, цвет которых можно настраивать. Так что у меня будут и регуляторы, и огни.
Вес одного регулятора: 5 грамм, итого 262 грамма общего веса.
Полётный контроллер: BeeRotor F4 mini
Отличный маленький дешёвый контроллер. Процессор F405, то есть порты UART не урезаны. Стек 20*20. В контроллере есть силовая разводка для регуляторов, а это именно то, что мне нужно. Из недостатков – отсутствует встроенный барометр, но есть шина I2C, поэтому барометр будет внешний.
Также отсутствует "чёрный ящик", то есть микросхема памяти или слот для SD-карты, куда пишется лог параметров полёта. Записи чёрного ящика позволяют проанализировать полёт и найти неполадки. Что ж, придётся обойтись так.
Наконец, отсутствует вход датчика тока. Я не узнаю, сколько ампер потребляет коптер в полёте, но мне это не особо нужно, так как все замеры с моторами я уже провёл на стенде.
Вес: 5 грамм, общий вес: 267 грамм.
Приёмник: ELRS MINI 2.4GHz
Очень маленький приёмник с протоколом ELRS на 2.4 ГГц с встроенной керамической антенной, которая вообще не занимает места. Попробовать ELRS я готовился давно, так что это будет в первый раз.
Вес: 1 грамм, общий вес: 268 грамм.
Камера: Caddx Turbo Micro F2
На самом деле пока точно не знаю, какая будет камера, но они все похожи. Проблема в том, что на раме категорически отсутствуют любые возможности крепления камеры, поэтому придётся подумать, что с этим делать.
Вес: 5 грамм, общий вес: 273 грамма.
Передатчик: JHEMCU RuiBet 1.6w
Про передатчик пока тоже не знаю, но пусть пока будет такой. Это одно из свежих приобретений, сделанных из любопытства. Внушительная мощность 1.6 ватта, хотя сомневаюсь как в её достоверности, так и в необходимости. В любом случае, так как я собираюсь пробовать ELRS, то попытаюсь отлететь подальше, и хотя бы 600 милливатт не помешает.
Стек 20*20, то есть его можно установить над полётным контроллером.
И вот моя первая ошибка: Стек 30.5*30.5, несовместим с 20*20. Этот передатчик не встанет с полётным контроллером, хотя возможны варианты в виде адаптеров. Я еще прикину, но наверно проще будет использовать другой.
Вес: 7 грамм, всего: 280 грамм.
Вот пока всё. Остальную мелочь вроде антенн, GPS и проводов буду подбирать по ходу пьесы, так как я уже говорил, что рама крайне бестолковая и придётся искать способы, как разместить каждый компонент.
Общий вес (+пропеллеры!) вероятно вырастет до 320 грамм. Отсюда будет плясать расчёт времени полёта.
Батарея и полётное время
Предположим, я соберу батарею из 6 высокотоковых элементов Li-Ion 18650 ёмкостью 3000 мА*ч каждый.
На деле мне просто проще считать вес с ними, т.к. каждый элемент весит около 50 грамм. Это позволит примерно прикинуть и вес эквивалентной Li-Poly батареи.
Таким образом, я получу батарею 3S2P ёмкостью 6000 мА*ч и весом 300-320 грамм.
По токоотдаче такая сборка по паспорту может выдать до 60 ампер, а мне нужно не более 48, да и то в прыжке.
Итого коптер и батарея будут весить 640 грамм, что даёт нам тягу висения в 160 грамм на мотор.
Осталось узнать, сколько потребляет мотор при такой тяге.
По моим замерам это примерно 2.2 ампера. Полётное время составит 6 / 2.2 * 15 = 40 минут, что очень даже хорошо. Но в реале оно будет скорее всего 30-35 минут. Но тоже неплохо.
Предположим, я сделаю батарею 3S1P из трёх элементов. Тогда её вес будет 150 грамм, ёмкость 3000 мА*ч, а общий вес будет 470 грамм и 117 грамм тяги на мотор. Тогда потребление будет 1.5 ампера на мотор, а полётное время 3 / 1.5 * 15 = 30 минут.
На деле опять же чуть меньше, но мы видим, что снижение веса и ёмкости (и цены!) батареи в 2 раза приводит к не очень значительному уменьшению полётного времени – именно потому, что снижается вес!
В общем, по полётному времени всё получается хорошо с довольно широким выбором батарей. Можно поставить даже совсем маленькую и лёгкую батарею и летать к примеру 15 минут.
Итог
Компоненты подобраны, расчёты сделаны, можно начинать собирать коптер. Я прикину, что и как должно быть, и вернусь с результатами.
Читайте дальше: