Предыдущая подборка: Введение
Предыдущие части: Батарея и время полёта, Пропеллеры и эффективность, Подбор ВМГ, Составление начальных требований
В предыдущих частях мы освоили методику, как определиться с моторами, пропеллерами и батареей.
Сейчас нужно спроектировать разводку питания от батареи до всех потребителей.
У батареи есть два провода: плюс и минус. Мы имеем: 4 мотора, 4 регулятора оборотов (ESC), полётный контроллер, приёмник, курсовую камеру, видеопередатчик.
Всё это нужно запитать от одной батареи. Как развести провода?
Можно, конечно, к каждому батарейному проводу припаять пучок других проводов. Но это и некрасиво, и неудобно.
К тому же некоторые устройства не могут питаться напрямую от батареи. Например, напряжение батареи 16.8 вольт, а приёмнику и камере нужно 5 вольт, а видеопередатчику нужно 12 вольт.
Все эти вопросы решает плата распределения питания (PDB – Power Distribution Board).
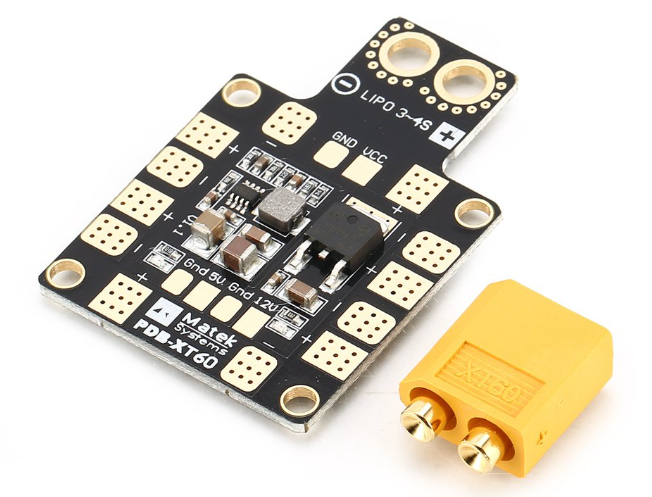
Она имеет удобно расположенные контакты, к которым с одной стороны припаивается батарея, а с другой – потребители, а также преобразователи-стабилизаторы напряжения на 5 и 12 вольт (ещё бывает 9 вольт или вообще ничего не бывает, что зависит от конкретной модели PDB).
Что проектируем?
Если PDB решает проблему разводки, то что именно нужно проектировать?
Существует очень много компонентов, чей функционал частично или полностью дублирует PDB.
Например, полётный контроллер, который имеет силовую разводку и преобразователи напряжения:
Например, видеопередатчик, который работает от батареи, но может ещё выдавать 5 вольт для других потребителей.
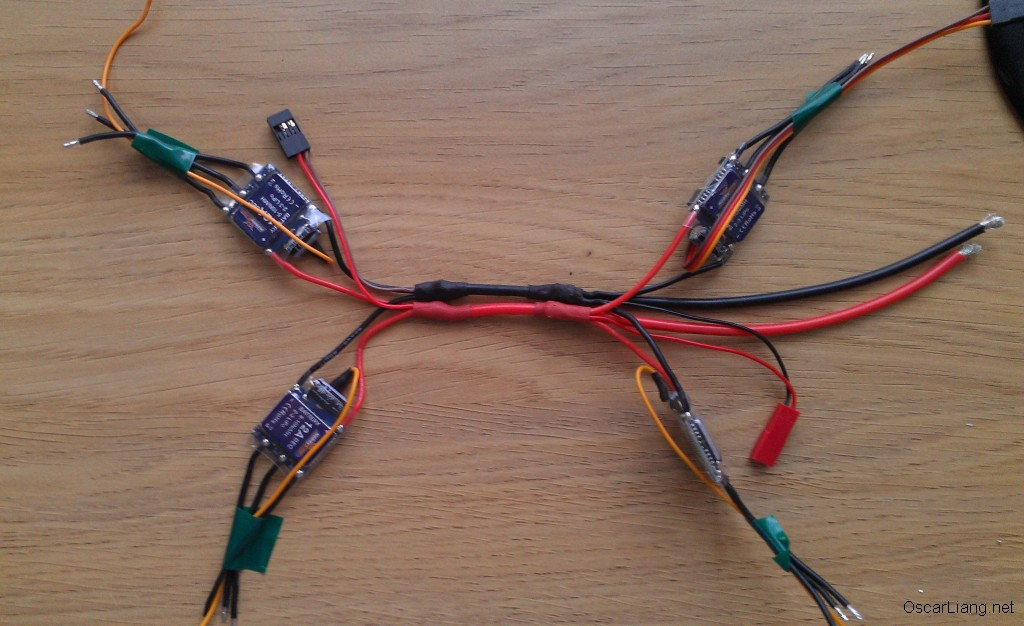
Например, регулятор оборотов, который совмещает в одной плате 4 регулятора и поэтому выполняет функцию PDB:
Также силовая разводка может быть встроена прямо в раму:
Далее, какие компоненты могут работать прямо от батареи? Это тоже вопрос выбора. Вы можете купить курсовую камеру, которая работает от напряжения строго 5 вольт, либо 5-25 вольт. То же самое с видеопередатчиком. Но вот приёмнику, барометру, компасу и GPS всегда нужно 5 вольт. Источник 5 вольт может находиться: на PDB, на полётном контроллере, на видеопередатчике, и даже на регуляторе оборотов.
Всё это порождает различные схемы соединения компонентов.
Ваша задача – согласовать каждый компонент так, чтобы ему было откуда питаться своим положенным напряжением, при этом чтобы было удобно, и при этом не нагородить лишнего. Например, нет смысла иметь полётный контроллер с встроенной PDB и регулятор "четыре в одном", так как он тоже дублирует функционал PDB.
Ничего страшного в дублировании конечно же нет, но это просто может быть и дороже, и неудобнее.
Так как проектировать?
Очень часто выбор того или иного компонента становится ключевым и влияет на всё остальное.
Допустим, ключевым будет полётный контроллер. Какой именно взять, будет продиктовано самыми разными причинами, например:
- Дешёвый
- Есть в наличии прямо сейчас
- Шьётся нужной прошивкой
и др.
Получив именно этот контроллер, вы уже будете плясать от него. Если у него нет встроенной PDB, то вам нужно будет брать регулятор "4-в-1", а если возьмёте раздельные регуляторы, то тогда надо и PDB, но если в раме есть силовая разводка, тогда не надо отдельной PDB, и т.д.
Для иллюстрации, так выглядит схема с 4 регуляторами, подключёнными к PDB:
(К каждому из этих регуляторов нужно ещё припаять по мотору.)
А это 4 мотора, подпаянные к регулятору "4-в-1", который сам себе PDB:
И наконец...
Окончательно этот вопрос можно закрыть, выбрав раму. От неё тоже зависит, какие компоненты вам придётся подгонять. Это мы обсудим дальше.
Читайте дальше: