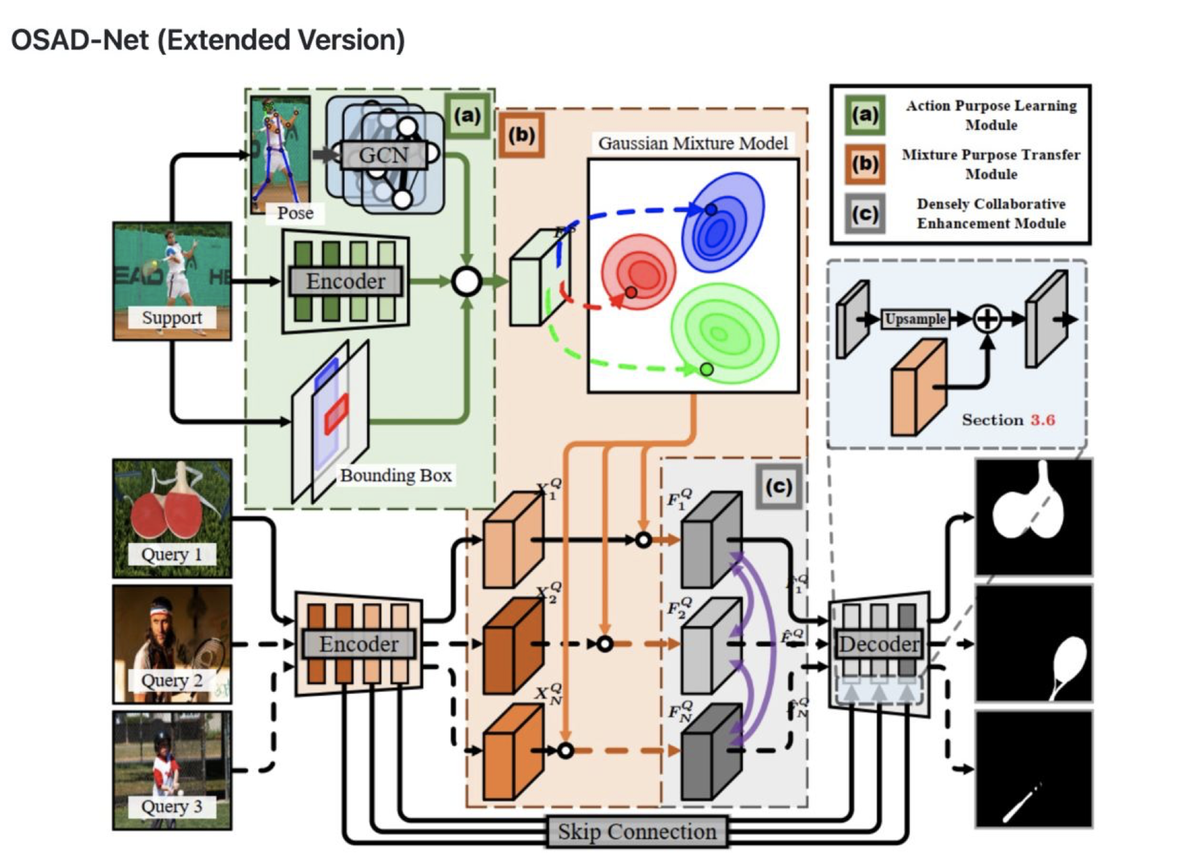
Обнаружение возможностей дальнейшего действия относится к выявлению потенциальных возможностей действий объектов на изображении, что является важной способностью для восприятия и манипулирования роботом. С этой целью мы разрабатываем Сеть обнаружения одноразовых возможностей (OSAD-Net).
Подробнее: https://github.com/lhc1224/OSAD_Net
Статья: https://arxiv.org/abs/2202.12076v1
Датасет: https://paperswithcode.com/dataset/pad