Пока Curiosity бродит в горах, удивляет нас находками и готовиться выйти на фронтон (равнину) Гринхью, второй марсоход, Perseverance мчится на всех парах к месту, где он сел на Марс чуть больше одного года назад.
Он, действительно, мчится. Так как местность для команды достаточно знакомая (ровер по ней уже проезжал), то в него загружают задание не на один сол, а на три. То есть три сола ровер работает автоматически, без управления с Земли. Что это дает? Во-первых, ровер прошел максимальное расстояние за одни сол - 320 метров и, максимальное без вмешательства Земли - 510 метров. Во-вторых, команда получила неплохой бонус - она смогла отдохнуть два дня подряд.
Как это делается? В ровер завели программу Autonav, которая очень хорошо обнаруживает геометрические препятствия типа камней, высоких склонов и избегает их.
А вот обнаружить дюны или песок эта программа не может. Поэтому, при составлении задания по движению, такие зоны обозначаются как "запретные", то есть ровер туда попасть не может.
Проблема в том, что система измерения передвижения может измерять скольжение колес, и учитывать его при расчете пройденного расстояния, система это делает не слишком точно и ошибка точности накапливается при движении. То есть ровер может въехать в "запретную" зону, а программа его не остановит.

Команде приходится каждый сол выставлять на ноль эту погрешность. Программирование задания на три сола получилось раз в пять сложнее, потому что эти погрешности накапливаются и накладываются друг на друга. И это надо сделать в течение одного рабочего дня команды.
Всё получилось как задумано, и марсоход прибыл на место очередного забора образцов.
Вертолетик также поработал: совершил свой двадцатый полет и пролетел чуть больше трехсот метров.
Стрелками я показал планируемое направление движения марсохода в ближайшее время (если, как пишут, команда решила взять еще один образец, то это займет около двух недель), поэтому "ближайшее время" может оказаться достаточно отдаленным. :-)
В районе, где работает ровер, заканчивается лето. Днем минус 5С, а ночью - все минус 78С, давление 657 Па.
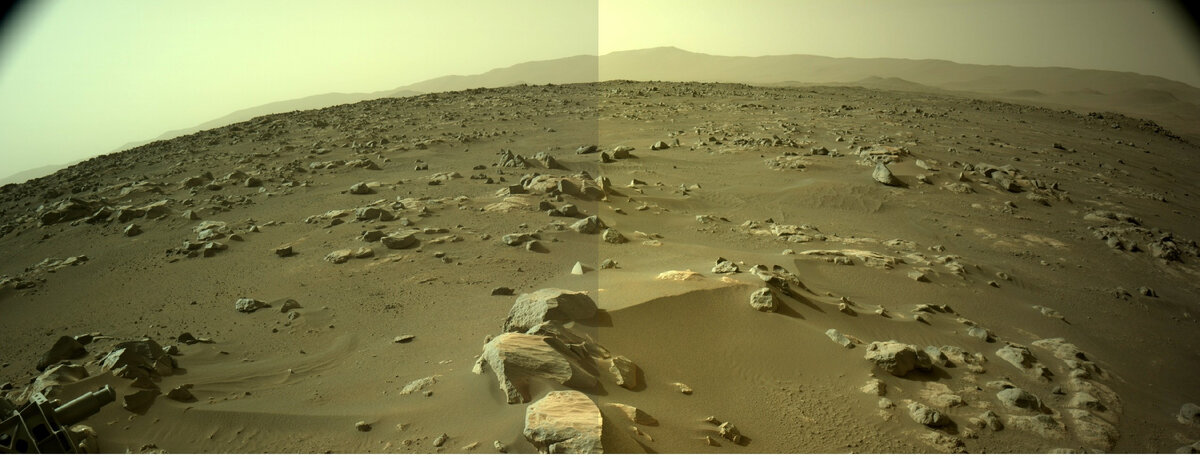
Еще несколько булыжников (они здесь более "правильные", чем в районе Curiosity).
Напоминаю, синева, которую можно заметить в некоторых местах на камнях и на песке, означает, что это место нагревается чуть больше чем окружающая местность - камера чувствительна не только к видимому свету, но и захватывать инфракрасный диапазон.
InSight
Станция находится на Марсе уже 1159 сол. Она уже старенькая и ее солнечные батареи засыпаны пылью прошедшей пылевой бурей. Питания едва-едва хватает на единичные исследования. Вот смотрите, в 1156 сол станция опустила штангу с совком и прижала его с определенным усилием.
И только на следующий день штанга с совком была поднята.
По степени погружения совка в песок определяется плотность песка, который был принесен последней бурей.
Также станция проводила замер температуры, давления и ветра. Но питания станции пока хватает только на три дня непрерывной работы. После этого необходимо снова копить энергию.
Из графика видно, что наиболее тепло после полудня, около часа дня, минус 18С, а холодно было в шесть вечера (минус 60С). Какая температура была ночью - мы не знаем. Как я понимаю, аккумуляторы уже не держат. Поэтому первую половину дня просто идет их заряд, для работы после полудня.
Пока все новости.
О китайском ровере пока никакой информации нет.
Будьте, пожалуйста, спокойнее. И мира на Земле.
ххх
Все фотографии взяты с сайта https://mars.nasa.gov/msl/home/
Панорамы - это моя работа.
К сожалению, в настоящее время алгоритм Дзена устроен так, что без Ваших лайков и комментариев статья совсем не показывается в ленте. Да и я буду знать, что пишу не зря. Если есть чем поделиться, пишите в комментариях, обязательно отвечу.
Если подпишетесь, то Вы всегда будете в курсе новых публикаций!