Основная задача регулирования - поддержание значения измеряемой физической величины на заданном уровне или изменение ее по определенному закону, в зависимости от того, является она постоянной величиной или функцией времени. Решают эту задачу с помощью закона регулирования. Выбор оптимального закона для каждой конкретной системы определяется необходимой точностью, степенью инерционности системы, наличием или отсутствием внешних воздействий на систему и так далее. В этой статье мы расскажем, какие преимущества имеет ПИД-закон регулирования перед самым простым законом - пропорциональным, и какое влияние на процесс регулирования оказывает каждая его составляющая. С помощью данных законов можно управлять различными физическими величинами, но для простоты объяснения рассмотрим в рамках этой статьи процесс регулирования температуры.
Позиционное регулирование
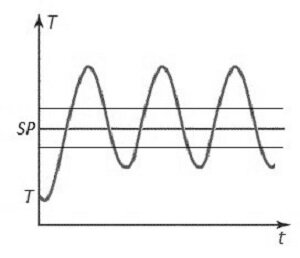
Самый простой закон регулирования - позиционный. При этом методе, на исполнительное устройство подается полная мощность до достижения температурой заданного значения (SP - температура уставки), после чего подача мощности прекращается. Несмотря на это, разогретый нагреватель продолжает отдавать тепло, и температура объекта какое-то время продолжает расти, что приводит к перегреву, иногда значительному. При последующем остывании объекта, по достижении SP, на нагреватель вновь подается полная мощность. Нагреватель сначала разогревает себя, затем окружающие области объекта, и, таким образом, охлаждение будет продолжаться до тех пор, пока волна тепла не достигнет датчика температуры. Следовательно, реальная температура может оказаться значительно ниже температуры уставки. Таким образом, при позиционном законе регулирования возможны значительные колебания температуры около заданного значения.
ПИД закон регулирования
Если такие колебания температуры объекта не допустимы, необходимо применить пропорционально-интегрально-дифференциальный закон регулирования (ПИД закон). Он предполагает уменьшение мощности, подаваемой на нагреватель, по мере приближения температуры объекта к заданной температуре. Кроме того, в установившемся режиме регулирования по ПИД закону находится величина тепловой мощности, необходимой для компенсации тепловых потерь и поддержания заданной температуры. Пропорционально - интегрально - дифференциальный закон регулирования обеспечивает значительно более высокую точность поддержания температуры, чем позиционный. Мощность N, которая должна выделяться нагревателем, выраженная в процентах от его максимальной мощности, рассчитывается по формуле:
Пропорциональная составляющая
Первое слагаемое в выражении прямо пропорционально отклонению температуры от уставки SP - ∆ܶТ, то есть разности между ܶSP и текущим измеренным значением температуры ܶТ. Вот почему это слагаемое называется пропорциональной составляющей, а заданный в °С коэффициент Кр - пропорциональным коэффициентом. При постепенном приближении температуры к заданному значению SP, пропорциональная составляющая будет способствовать плавному уменьшению мощности на нагревателе. Однако, стабилизация температуры на необходимом значении при использовании в расчете мощности одной пропорциональной составляющей невозможна. В ней не учитывается инерционность объектов, а также погрешности исполнительных механизмов и каналов измерения. Поэтому возникает статистическая ошибка, когда температура стабилизируется на значении ниже, чем SP и не может его достичь, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать. Статистическую ошибку можно уменьшить, увеличивая Кр, однако при слишком большом его значении система перейдет в автоколебания, а затем потеряет устойчивость.
Интегральная составляющая
Для устранения статистической ошибки используют интегральную составляющую. Это второе слагаемое в формуле и в установившемся режиме регулирования (при ∆ܶТ = 0) оно равно величине тепловой мощности, необходимой для компенсации тепловых потерь. Кi в этом слагаемом - интегральный коэффициент, имеющий размерность времени. Интегральная составляющая учитывает опыт предыдущих ошибок регулирования и вносит поправку, чтобы в будущем отклонение от заданного значения было равно нулю. Вклад пропорциональной и интегральной составляющих можно описать на примере: если необходимо нагреть воду от 0 до 20 °С, то пропорциональная составляющая установит значение мощности, необходимое для нагрева до 18°С, а ошибку в 2°С спустя время компенсирует интегральная составляющая. Именно из-за того, что накопление ошибок в интеграле происходит не мгновенно, а с течением времени, интегральная составляющая начинает вносить существенный вклад в значение мощности не сразу, и медленная скорость приведения температуры к заданному значению SP- ее главный недостаток.
Дифференциальная составляющая
Третья составляющая - дифференциальная - обратно пропорциональна скорости изменения температуры с коэффициентом Kd (дифференциальным коэффициентом размерности времени) и должна препятствовать резким изменениям температуры объекта. Она предупреждает отклонения температуры, которые могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
Настройка ПИД коэффициентов
Таким образом все три составляющие вносят свой уникальный вклад в регулирование измеряемой величины, способствую повышению точности и увеличению скорости. Важно заметить, что качественное регулирование возможно только при правильной настройке ПИД-коэффициентов: Kp, Ki и Kd. В приборах Термодат они могут быть найдены автоматически при запуске режима "автонастройки". Для многих систем такой расчет позволяет найти значения коэффициентов, обеспечивающие высокое качество регулирования. Однако в некоторых случая необходимо задавать коэффициенты вручную. Это может быть сделано наладчиком оборудования в режиме ручной настройки прибора. В следующих статьях мы приведём различные варианты нахождения коэффициентов ПИД закона регулирования.