Данную статью можно отнести к разделу "мысли вслух". Начну с того, что. ещё со школы мы привыкли рассчитывать все физические процессы по стандартным формулам. Например скорость и расстояние рассчитываются по вполне очевидным формулам:

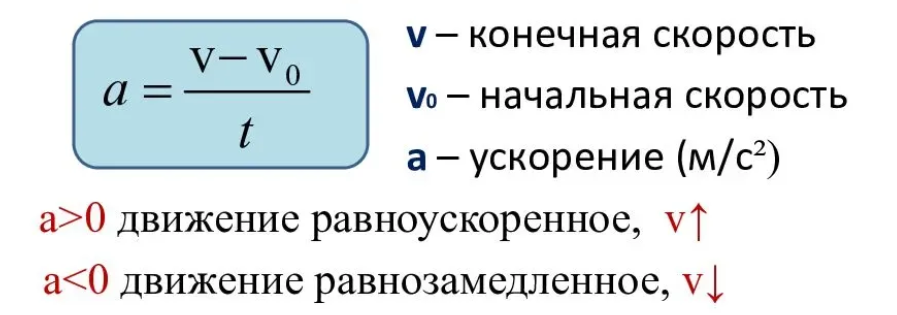
Далее в процессе обучения, мы понимаем, что это лишь усредненные значения и к реальным процессам, они имеют лишь приблизительное отношение. даже если мы не будем учитывать, различные сторонние факторы. Скорость на одном участке не может быть постоянной. всегда есть время разгона и время торможения. Конечно, стоит вспомнить формулу ускорения и его зависимости от времени.
Попробуем найти расстояние, в зависимости от начальной скорости и ускорения:
Всегда к этой формуле делается поправка на то, что движение равноускоренное. Но опять. таких условий в природе не бывает. Даже тело(физическое), падая с большого расстояние, на разной высоте и разной скорости падения будет иметь не только каждый раз разное ускорение. но и разный градиент ускорения. Приведу пример. Когда тело падает с высоты в 1000 метров(например), то во время падения будет ощущаться на разной высоте разная плотность воздушных масс. Плюс ко всему. при росте скорости падения возрастает сила сопротивления воздуха. Также изменяется и сила тяжести(сложно сказать на сколько сильно). Получается что эти формулы не работают при высокой точности.
Получается. что любое тело не движется прямолинейно и с постоянной скоростью или ускорением.
Возникает вполне логичный вопрос. а на что тогда опираться. В современном мире есть два способа измерения скорости автомобиля(например) внутренними средствами измерения.
1. Это классический спидометр. который кстати опирается на скорость вращения двигателя. Правда. привязка идет через коробку передач. но первоисточник вращения - двигатель.
2. Позиционирование в пространстве с помощью системы ГЛОНАСС.
Можно измерить скорость извне, но это уже немного другая история.
Получается. что большинство механических движений. полученных за счет электроэнергии имеет вращение как основу движения. большинство транспортных средств. преобразуют энергию вращения двигателя в перемещение.
Если вы возьмете любое современное устройство с механикой. чаще всего там есть обычный или шаговый двигатель.
Получается. что в основе лежит не простая формула линейного перемещения, а колебательная система с вращением. Любая скорость и ускорение - это следствие колебаний одного из элементов системы. обратите внимание. большинство видов транспорта зависят от этого. Разве что реактивная тяга выстроена по другому принципу.
Если обратится к движению жидкостей и газов. опять в основе лежит вращение(насос, турбина. вентилятор).
Получается, что в основе почти любого механизма лежит вращение.
Таким образом получается, действительно, сложные системы управления. слежения. регулирования строятся через передаточные функции. в основе которых лежит гармоническое колебание. А переменная берется не просто частота колебаний. а циклическая частота.
Как вы понимаете. в основе движения лежит не линейная формула. а формула колебательного процесса.(но это мои мысли).
Пример расчета частоты асинхронного двигателя
Получается, что для работы необходимы колебания тока(один из параметров).
На мой взгляд правильнее все расчёты начинать колебаний и после этого приводить к конечному результату.
Как итог. скажу, что регулирование скорости движения платформы или шпинделя в ТАУ начинается. как раз с построения передаточной функции привода. А далее уже с помощью фильтров или других звеньев происходит выравнивание функции.
Интересно было бы послушать ваше мнение по этому поводу.