В этой статье, будут разобраны общие принципы работы частотного регулятора скорости, на примере запуска модели трехфазного генератора с постоянными магнитами в качестве синхронного электродвигателя.
Частотный преобразователь также применяется и для асинхронных двигателей. Для регулировки скорости вращения вала асинхронного двигателя применяют следящие способы:
- изменение дополнительного сопротивления цепи ротора;
- изменение напряжения, подводимого к обмотке статора двигателя;
- переключение числа пар полюсов;
- изменение частоты питающего напряжения.
Наиболее перспективный метод регулирования угловой скорости ротора – преобразование частоты питающего напряжения. Этот способ обеспечивает сохранение механических характеристик во всем диапазоне и обладает рядом других преимуществ.
Типичный частотно-регулируемый привод для промышленного двигателя переменного тока обычно работает путем выпрямления сетевого напряжения (часто 400 В трехфазного для промышленных приложений). Результирующая мощность постоянного тока передается по шине постоянного тока к инвертору. Инвертор генерирует сигнал с широтно-импульсной модуляцией. Этот сигнал мощности переменного тока запускает двигатель, который в промышленных условиях обычно является трехфазным асинхронным двигателем.
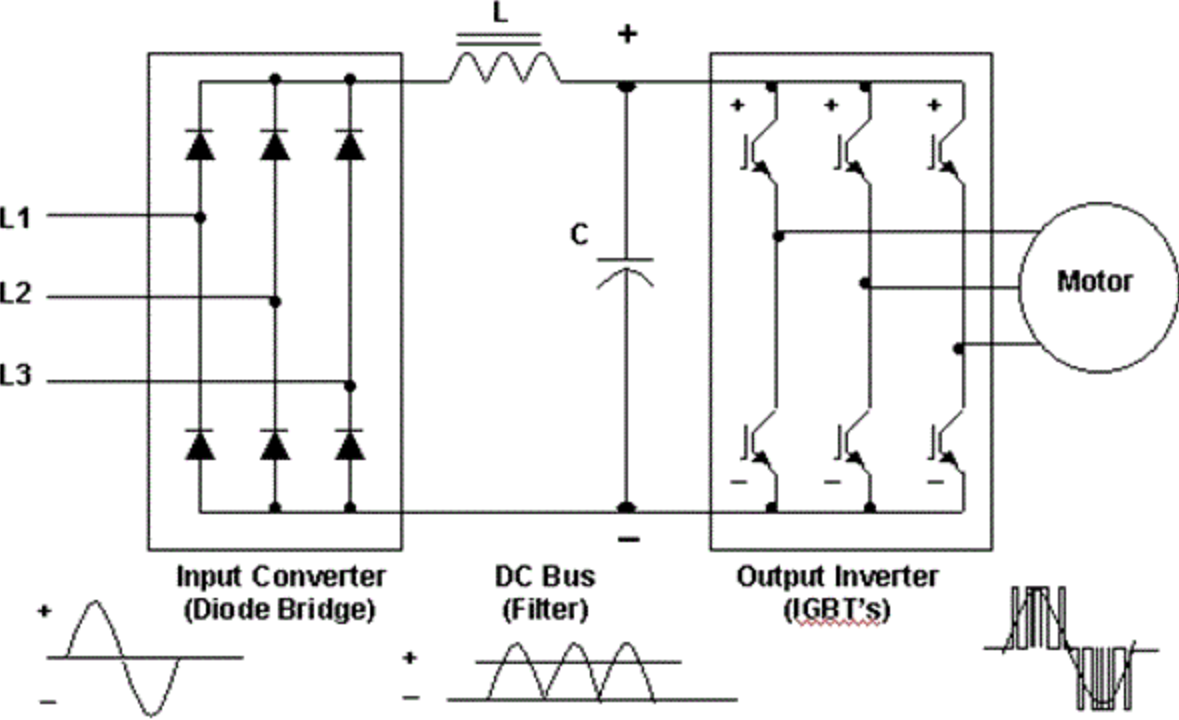
Инвертор, преобразователь постоянного тока в переменный, получает постоянный ток. Инвертор обычно состоит из шести биполярных транзисторов с изолированным затвором (IGBT), которые создают выходной сигнал с широтно-импульсной модуляцией, который питает двигатель. Сам инвертор при этом может питаться либо от источника однофазного напряжения (через выпрямитель), или даже от батарей.
Для синхронного электродвигателя изменение частоты питающего напряжения - единственный способ изменить скорость вращения вала. Вал такого электродвигателя может вращаться только со скоростью вращения магнитного поля. Однако для синхронного электродвигателя появляется одно преимущество - зная какую частоту мы подали на электродвигатель мы всегда будем знать с какой скоростью вращается вал. Постройка простейшей модели инвертора и будет разобрана в этой статье. Для упрощения примера ШИМ модуляция для создания синуса использоваться не будет.
Для частотного преобразователя потребуются шесть электронных ключей.
Для того, чтобы понять в каком порядке переключать эти ключи, воспользуемся картинкой из Википедии.
Разберем первый интервал времени t1 (0....60)
Красная и зеленая линии находятся выше нуля, синяя ниже. Открываем ключи К1, К2, К6. Ток будет входить в обмотки L1 и L2 и выходить через обмотку L3.
Следующий временной интервал t2 (60....120)
Красная линия находится выше нуля, зеленая и синяя ниже. Открываем ключи К1, К5, К6. Ток будет входить в обмотку L1 выходить через обмотки L2 и L3. И так далее.
Выписываем все необходимые переключения согласно графика:
Получается таблица с порядком переключений ключей:
Для примера возьмем интервал t равным 28 миллисекундам:
- период Т = t1+t2+t3+t4+t5+t6 = 168 миллисекунд;
- учитывая конструктивные особенности данного генератора (количество полюсов постоянных магнитов 12), за это время вал повернется на 1/6 оборота;
- один полный оборот вал совершит за 168*6 = 1008 миллисекунд или примерно 1 оборот в секунду;
- за одну минуту вал совершит 60*1000/1008 = 59,5 оборота в минуту
Математический аппарат готов - можно проектировать "железную" часть. Переключать ключи в нужной последовательности будем с помощью Arduino. Если выполнить ключи на транзисторах, то код нужно будет писать крайне аккуратно - любое парное замыкание ключей (например К1 и К4) приведет к короткому замыканию. Мне лень искать 6 транзисторов, и поэтому я буду использовать 2 драйвера TB6612FNG про которые писал в прошлой статье. (на каждую фазу используется по одному каналу).
Драйверы подключены таким образом образом, что при подаче на вход PWM логической единицы, на выходе будет напряжение +7V, а при подаче логического нуля выход будет притянут к земле.
Управлять скоростью и направлением вращения будем с помощью переменного резистора, но для начала просто запустим электродвигатель со скоростью вращения вала 59,5 об/минуту.
В скетче будем поочередно дергать ножки D5, D3, D2 в соответствии с табличкой, которую нарисовали используя картинку из Википедии.
Из теории электрических машин известно, что для изменения направления вращения достаточно махнуть местами любые 2 фазных провода. В данном случае перетыкать физически провода нет ни какой необходимости, можно просто махнуть местами две любые переменные.
Для отключения электродвигателя достаточно написать 1 строчку кода:
Переходим на управление от потенциометра, создаем 2 процедуры:
В основном цикле опрашиваем аналоговый вход к которому подключен потенциометр и управляем скоростью и направлением вращения.
Таким образом используя Arduino, 2 драйвера, и Википедию достаточно легко сделать простенький частотный преобразователь. Понятно, что для более точного контроля скорость вращения ротора необходимо использовать аппаратные таймеры, работу с регистрами и прочие прелести цивилизации типа дисплея для отображения частоты, а сами синусоидальные ЭДС создавать используя ШИМ.
Тем не менее даже такой простой алгоритм позволил создать трехфазный ток, с помощью которого удалось создать вращающееся магнитное поле. В этом легко убедиться если поместить в это самое поле медную рамку
(а-ля "беличья клеть").
Тут вообще нет ни каких магнитов, тем не менее можно управлять как скоростью так и направлением вращения рамки.
На Дзен кстати есть забавная статейка с классификацией электромоторов
Очень бы хотелось узнать откуда такая ИНФА, и кто все эти люди которым это нравится. Даже самодельный, весьма примитивный "частотник" собранный на коленке, позволяет без труда запускать синхронный электродвигатель в нужном направлении.
На моем канале есть и другие статьи посвященные опытам с трехфазным током.
Подробный алгоритм работы с драйвером электродвигателей был разобран в этой статье:
Всем удачи!