Каждый человек имеет у себя дома робота.
Это-чайники, робот пылесос, блютуз бармен, наушники, колонки и т.д.
Задайте себе такой вопрос: А вы хотели бы сделать себе такого красавца?

Итак, начнем, пожалуй, с конструкции и принципа работы пылесоса.
В итоге список основных компонентов выглядит так:
1.ардуино про мини
2.L298N Motor Driver Module
3.колеса
4.повышающий конвертер
5.понижающий конвертер
6.ИК датчик 6 шт
7.контроллер заряда-разряда
8.крыльчатка для турбины (около 200 руб)
9.ПВХ для изготовления корпуса
10.АКБ 18650 4 шт.
11. 2 моторчика для щеток (модель не сильно важна)
12. 1 моторчик для турбины
13. 2 выключателя столкновения.
После этого надо все соединить, по схеме как на картинке.
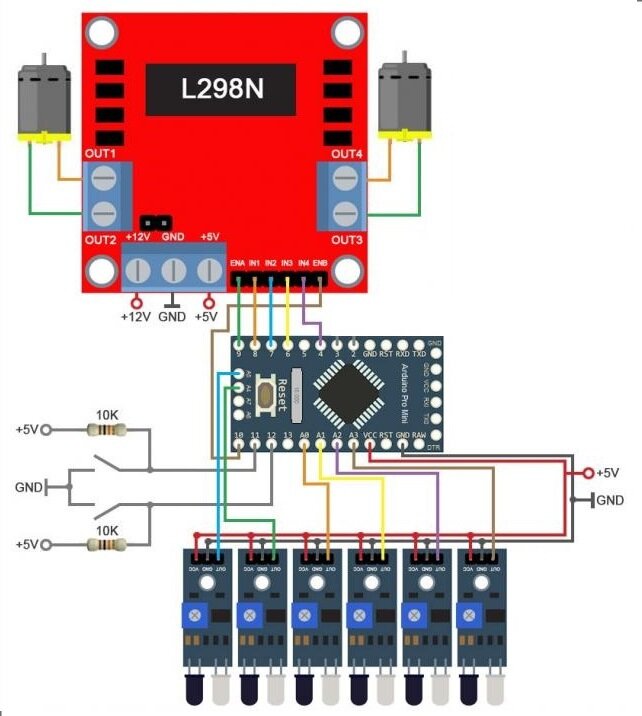
Далее из схемы видно, что пылесос оборудован 6 инфракрасными датчиками. Они срабатывают при приближении пылесоса к препятствию, давая команду остановиться и развернуться не врезаясь в него. Если же ни один из 6 датчиков не сработал и робот пылесос сталкивается с препятствием, то тогда срабатывает один из 2 выключателей, которые соединяют бампер (в котором находятся ИК датчики) и корпус робота.
Внимательные читатели заметили, что на схеме не показано питание робота. Тут решение вполне стандартное, использованы 4 аккумулятора формата 18650, подключенных последовательно две пары, через контроллер заряда-разряда АКБ. Далее с контроллера через выключатель подсоединены повышающий и понижающий DC-DC преобразователи. + 12 вольт питает моторы колес и моторы передних щеток. +5 вольт питает всю остальную электронику. Турбина питается от 7 — 8 вольт, так что для нее преобразователь не нужен.
После скачиваем программу Arduino, с этого сайта: https://www.arduino.cc/en/software
Пишем скетч(программу для робота).
Либо можете взять мою: #(надо перед каждым значением это пoст)
define mot_ena 9 //пин ШИМа левого мотора
define mot_in1 8 //пин левого мотора
define mot_in2 7 //пин левого мотора
define mot_in3 6 //пин правого мотора
define mot_in4 4 //пин правого мотора
define mot_enb 10 //пин ШИМа правого мотора
define ir_1 A0 //пин 1 ИК-датчика
define ir_2 A1 //пин 2 ИК-датчика
define ir_3 A2 //пин 3 ИК-датчика
define ir_4 A3 //пин 4 ИК-датчика
define ir_5 A4 //пин 5 ИК-датчика
define ir_6 A5 //пин 6 ИК-датчика
define lev_vik 11 //пин левого выключателя
define pra_vik 12 //пин правого выключателя
//для выравнивания скорости колес
byte max_skor_lev = 254;
byte max_skor_prav = 244;
//---------------------------------
byte min_skor = 0;
void setup() {
randomSeed(analogRead(A7));
// пины энкодеров на вход
pinMode(3, INPUT); // пин левого энкодера на вход
pinMode(2, INPUT); // пин правого энкодера на вход
//-------------------------
// пины для левого и правого моторов на выход
pinMode(mot_ena, OUTPUT);
pinMode(mot_in1, OUTPUT);
pinMode(mot_in2, OUTPUT);
pinMode(mot_in3, OUTPUT);
pinMode(mot_in4, OUTPUT);
pinMode(mot_enb, OUTPUT);
//-------------------------------------------
// пины ИК-датчиков на вход
pinMode(ir_1, INPUT);
pinMode(ir_2, INPUT);
pinMode(ir_3, INPUT);
pinMode(ir_4, INPUT);
pinMode(ir_5, INPUT);
pinMode(ir_6, INPUT);
//-------------------------
// пины левого и правого выключателей на вход
pinMode(lev_vik, INPUT);
pinMode(pra_vik, INPUT);
//---------------------------
delay(3000);
ROB_VPERED();
}
void loop() {
// если срабатывает левый выключатель на бампере
if (digitalRead(lev_vik) == LOW)
{
ROB_STOP();
delay(200);
ROB_NAZAD();
delay(150);
ROB_STOP();
delay(200);
ROB_PRAV();
delay(random(400, 1500));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает правый выключатель на бампере
if (digitalRead(pra_vik) == LOW)
{
ROB_STOP();
delay(200);
ROB_NAZAD();
delay(150);
ROB_STOP();
delay(200);
ROB_LEV();
delay(random(400, 1500));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 2 ИК-датчик
if (digitalRead(ir_2) == LOW)
{
ROB_STOP();
delay(200);
ROB_PRAV();
delay(random(200, 1100));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 3 ИК-датчик
if (digitalRead(ir_3) == LOW)
{
ROB_STOP();
delay(200);
ROB_PRAV();
delay(random(200, 1100));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 4 ИК-датчик
if (digitalRead(ir_4) == LOW)
{
ROB_STOP();
delay(200);
ROB_LEV();
delay(random(200, 1100));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 5 ИК-датчик
if (digitalRead(ir_5) == LOW)
{
ROB_STOP();
delay(200);
ROB_LEV();
delay(random(200, 1100));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 1 ИК-датчик
if (digitalRead(ir_1) == LOW)
{
ROB_PRAV();
delay(10);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 6 ИК-датчик
if (digitalRead(ir_6) == LOW)
{
ROB_LEV();
delay(10);
ROB_VPERED();
}
//-----------------------------------------------
}
// поворот направо на месте
void ROB_PRAV()
{
// левый мотор вперед
digitalWrite(mot_in1, LOW);
digitalWrite(mot_in2, HIGH);
analogWrite(mot_ena, max_skor_lev);
// правый мотор назад
digitalWrite(mot_in3, LOW);
digitalWrite(mot_in4, HIGH);
analogWrite(mot_enb, max_skor_prav);
}
//-----------------
// поворот налево на месте
void ROB_LEV()
{
// правый мотор вперед
digitalWrite(mot_in3, HIGH);
digitalWrite(mot_in4, LOW);
analogWrite(mot_enb, max_skor_prav);
// левый мотор назад
digitalWrite(mot_in1, HIGH);
digitalWrite(mot_in2, LOW);
analogWrite(mot_ena, max_skor_lev);
}
//---------------------
// езда вперед
void ROB_VPERED()
{
// левый мотор вперед
digitalWrite(mot_in1, LOW);
digitalWrite(mot_in2, HIGH);
analogWrite(mot_ena, max_skor_lev);
// правый мотор вперед
digitalWrite(mot_in3, HIGH);
digitalWrite(mot_in4, LOW);
analogWrite(mot_enb, max_skor_prav);
}
//-------------------------------------
// езда назад
void ROB_NAZAD()
{
// левый мотор назад
digitalWrite(mot_in1, HIGH);
digitalWrite(mot_in2, LOW);
analogWrite(mot_ena, max_skor_lev);
// правый мотор назад
digitalWrite(mot_in3, LOW);
digitalWrite(mot_in4, HIGH);
analogWrite(mot_enb, max_skor_prav);
}
//------------------------------------
// стоп
void ROB_STOP()
{
// левый мотор стоп
digitalWrite(mot_in1, LOW);
digitalWrite(mot_in2, LOW);
analogWrite(mot_ena, min_skor);
// правый мотор стоп
digitalWrite(mot_in3, LOW);
digitalWrite(mot_in4, LOW);
analogWrite(mot_enb, min_skor);
}
//--------------------------------
И можете наслаждаться своим изобретением.
До свиданья, надеюсь помог вам.