Начало космической эры было переполнено романтикой и большим количеством смелых и даже дерзких идей. Мало кто из ученых толком понимал, как будет вести себя человек в космосе (достаточно вспомнить опасения советских ученых, подвергавших «космонавтов №0» испытаниям в сурдокамерах и т.п.). Многие опасения ученых на практике оказались напрасны, а в некоторых случаях напротив, на первый взгляд очевидные и перспективные идеи оказались несостоятельными.
Одной из таких нежизнеспособных разработок, на которую НАСА возлагало большие надежды, являлся реактивный пистолет HHMU для программы «Джемини» и его модернизированная версия HHHMU (три Н) для программы «Аполлон» (см. ссылку на статью о реактивном пистолете для программы «Джемини» и «Аполлон»). Об этом мало пишут, но любой пытливый любитель космонавтики, задававшийся вопросом о том, что за странную штуку держит в руке американский астронавт во время первого выхода в открытый космос, знает об этом пистолете. Куда меньше русскоязычной информации о реактивных ботинках, разработанных НАСА для программы «Аполлон» и испытанных на борту орбитальной станции «Скайлеб».
Реактивные ботинки НАСА для перемещения в космосе.
В свое время НАСА возлагало большие надежды на реактивные ботинки искренне полагая, что такие они могли облегчить деятельность астронавтов в открытом космосе.
Впервые об этих ботинках было сообщено на страницах журнала Aviation Week в 1966 году. Предполагалось, что они окажутся удобными в полетах КК «Аполлон», когда астронавты будут выходить в космос на длительное время с целью построения станций и орбитальных платформ.
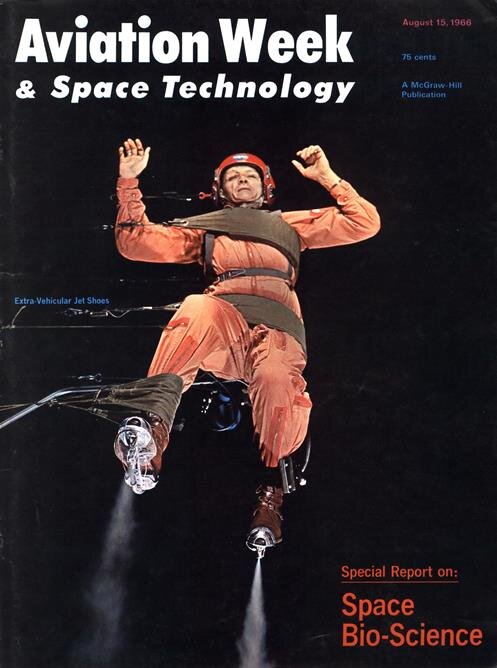
Первая конструкция ботинок имела пару миниатюрных двигателей, которые устанавливались на подошве каждого ботинка таким образом, что вектор тяги был направлен вдоль ноги.
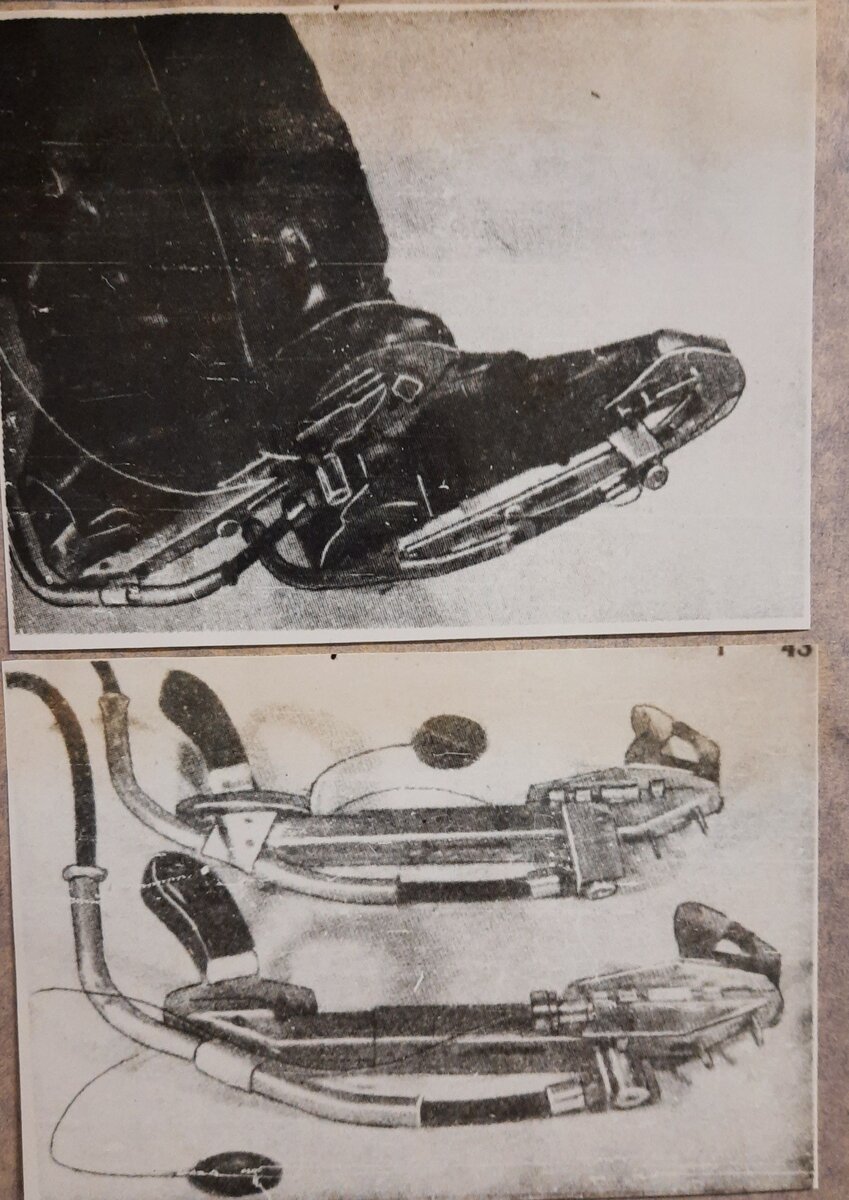
Реактивный двигатель, находящийся на подошве ботинка мог включаться и выключаться при сгибании (нажатии) пальцев стопы. Реактивные двигатели, установленные на ботинках, функционировали независимо друг от друга; причем, тяга этих двигателей составляла немного более одного килограмма.
Во время экспериментов, испытуемый мог управлять своим положением в пространстве и движениями с предельной точностью, но такая модель ботинок была подвергнута «критике» и в основном, из-за неудобства для астронавта, одетого в скафандр, включатель/выключатель двигателя и очень тяжелый вес.
Приложение тяги с реактивными ботинками происходит таким образом, что создается вектор силы, действующей через осевой центр тяжести астронавта. Результирующее действие происходит головой вперед т.к. колени, естественно, сгибаются. Далее следует естественная реакция – надавить подушечки пальцев ног, что взывает (по крайне мере, на той поверхности, на которую надавливают) восстанавливающий момент, который помогает телу астронавта вернуться в положение «стоя».
Изменение угла наклона вектора тяги вперед по отношению к центру тяжести создает подобный же восстанавливающий момент.
С другой стороны, восстанавливающий момент вращения в переднем направлении создается благодаря поднятию передней части ступни во время работы миниатюрных двигателей; таким образом, нагрузка на подушечки пальцев уменьшается в положении «стоя».
Таким образом, управление ботинками строилось на основном на чувствительности психомоторных систем человека, что также используется при нормальном (естественном) процессе установления равновесия и ориентации для обеспечения необходимого контроля.
В ходе испытаний было определено, что для уравновешивания переднего и заднего моментов тангажа, реактивные двигатели должны монтироваться впереди на ботинках, чем под подъемом ботинка; кроме того, двигатели должны устанавливаться с наклоном вперед на 30 градусов, чтобы компенсировать нормальные движения голени.
Имелись и проблемы с управлением ботинком т.к. имело место большое запаздывание между началом работы реактивного двигателя и «результирующего движения». Испытуемому было необходимо совершить один полный оборот в плоскости переднего тангажа с тем, чтобы например, достигнуть угловой скорости порядка шести оборотов в минуту.
Применение реактивных ботинок в космосе
Что касается применения ботинок в космосе, то модернизированная версия в которых «испытуемый мог отталкиваться с одного места, передвигаться из конца в конец и довольно плавно останавливаться близко у цели, даже в том случае, если у испытуемого нет опыта в обращении с реактивными двигателями» была испытаны на орбитальной станции «Скайлеб». После испытаний на ОС «Скайлеб», о ботинках, которые «могут оказаться очень удобными в полетах КК «Аполлон» предпочли больше не вспоминать.
Что касается причин отказа от этой идеи, то она до безобразия банальна: автор блога «Прогулки в стратосфере» уверен, что 99% дочитавших эту статью так и не поняли, как происходило управление и сохранялась координация во время применения этих ботинок. Тем более, астронавты, на которых возлагались сложные задачи не горели желанием превращаться в цирковых обезьянок и совершать немыслимые выкрутасы.
В дополнение ранее опубликованные статьи на темму установко для перемещения в космосе:
3 -Описание советской установки для перемещения и маневрирования в космосе 21КС;
4- Описание реактивного пистолета для перемещения в космосе по программе «Аполлон»;
5- Описание американской установки для перемещения и маневрирования в космосе MMU;
6- Описание установки для перемещения и маневрирования в космосе для программы «Джемини»;
7- Описание спасательной установки для скафандра «Орлан»;
8-Маневрирующая площадка НАСА MWP "Воздушный скутер";
9-"Космическое такси" НАСА 1967 года.
Ставьте лайк и подписывайтесь на канал «Прогулки в стратосфере». В скором времени планируется статья о советском авиационном высотном компенсирующем костюм для собак.