Блоки управления коллекторными двигателями серии BMSD-Modbus, позволяют управлять моторами (мотор-редукторами) постоянного тока с установленными на них энкодерами, вращая вал на определенное количество импульсов (получаемых с обратной связи) – работа по позициям. Таких позиций, в памяти контроллера, может быть от одной до четырех. Управление двигателем происходит по протоколу Mоdbus RTU (интерфейс RS485), в двух режимах: Прямой режим управления – команды подаются от внешнего контроллера или компьютера, в режиме реального времени, и второй режим – работа по программе пользователя (автономная работа), записанной в памяти контролера BMSD-Modbus.

В данной статье описывается управление актуатором постоянного тока с интегрированным двухканальным энкодером – ЛА3.
Характеристики актуатора:
• Ход штока – 115мм (данные актуаторы выпускаются с разной величиной хода)
• Усилие на толкание и втягивание – 1000 Н (около 100 кг). Усилие зависит от передаточного отношения редуктора актуатора, в данном случае передаточное отношение составляет i=1/40.
• Напряжение питания – 24В
• Актуатор двухканальный, на основе датчиков Холла (Hall1 и Hall2)
Подключение.
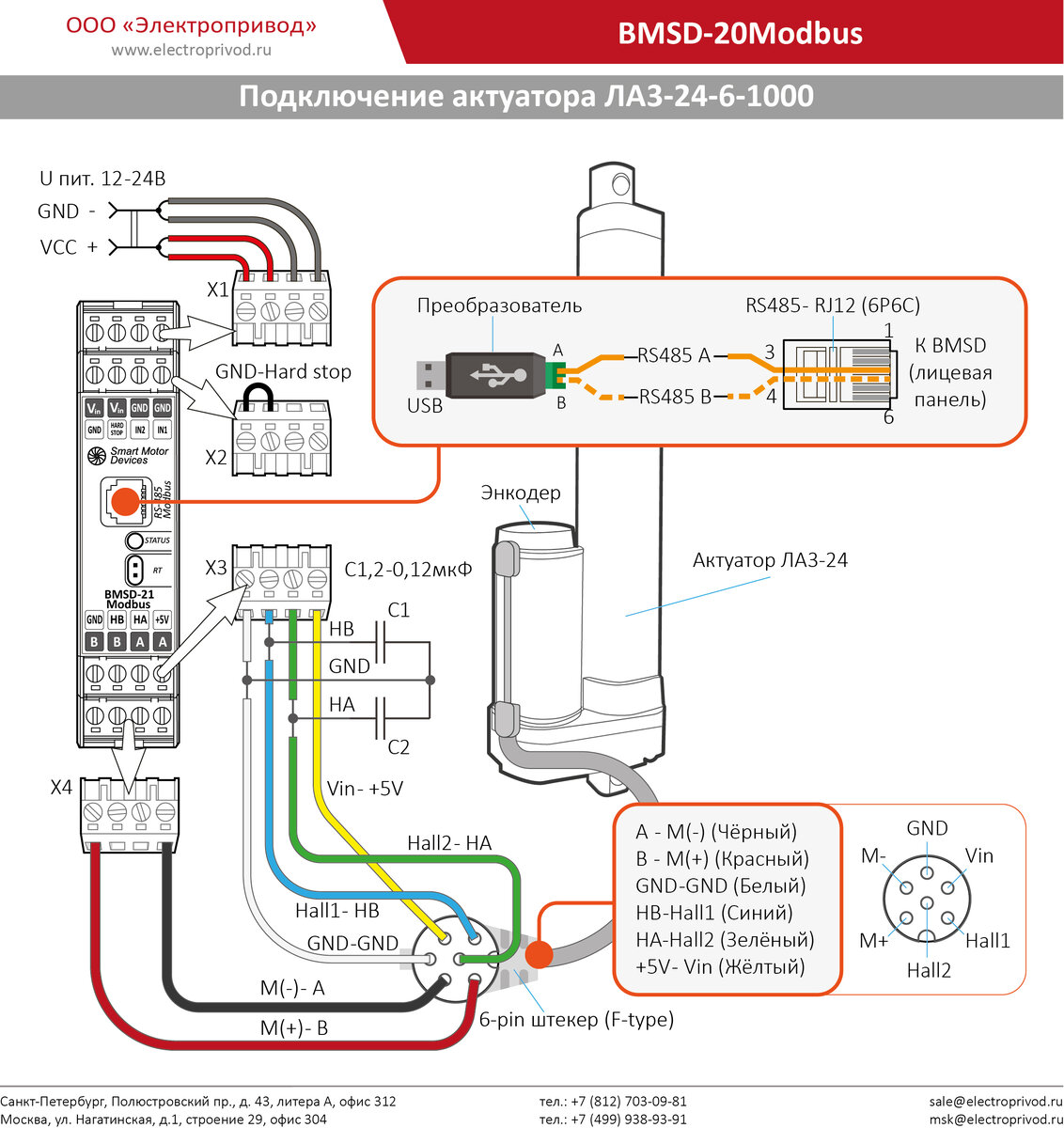
Первым делом, необходимо произвести все электрические подключения согласно схеме, представленной на первом рисунке:
• Клемма Х1 – питание контроллера, в нашем случае это 24В постоянного тока.
• Клемма Х2 – только провод, соединяющий GND и Hard Stop. Сигналы аналогового управления нам не потребуются, т.к. управление контроллером будет осуществляться по Modbus.
• Клемма Х3 – сигналы обратной связи от датчиков Холла актуатора. Каналы НА и HB, необходимо зашунтировать на GND, конденсаторами номиналом 0,1мкФ, для уменьшения шумов, происходящих от силовых проводов питания двигателя актуатора.
• Клемма Х4 – питание двигателя актуатора.
• Контроллер подключается к компьютеру, с установленной и запущенной программой конфигурации и управления контроллерами BMSD-Modbus и BLSD-Modbus – Modbus Special Utility. Подключение осуществляется с использованием адаптера USB-RS485.