В этой части рассмотрим два интересных момента. Взлет и стыковка.
Общая схема полета на Луну Аполлона 11 и возвращения обратно:
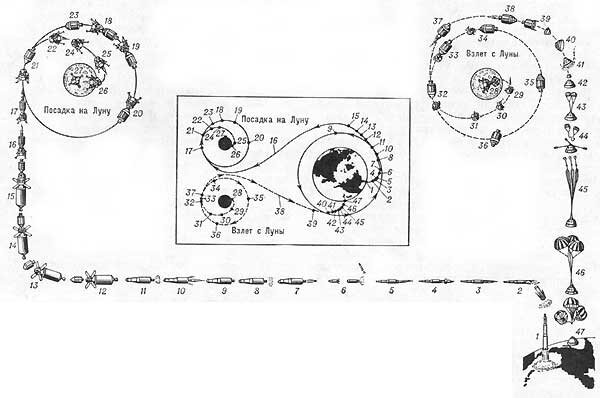
Схема полета космического корабля «Аполлон» (для наглядности дается в разном масштабе). 1 - старт; 2 - выключение основного двигателя (ОД) первой ступени и ее отделение, включение тормозных двигателей (ТД) первой ступени и разгонных двигателей (РД) второй ступени; 3 - включение ОД второй ступени; 4 -сбрасывание переходника; 5 - отделение САС; 6 - выключение ОД второй ступени и ее отделение, включение ТД второй ступени и РД третьей ступени; 7 - включение ОД третьей ступени 8 - выход третьей ступени с кораблем «Аполлон» на круговую геоцентрическую орбиту и выключение ОД; 9 - третья ступень на орбите (проверяются бортовые системы); 10 - включение РД и вторичное включение ОД третьей ступени; 11 - переход на траекторию полёта к Луне и выключение ОД; 12 - отделение ОБК; 13 - начало поворота ОБК; перед пристыковкой к ЛО; 14 - пристыковка ОБК к ЛО; 15 - отделение третьей ступени; 16 - коррекция траектории с помощью маршевого двигателя; 17 - перевод корабля на круговую селеноцентрическую орбиту; 18 - корабль на орбите (проверяются бортовые системы); 19 - переход двух космонавтов в ЛО; 20 - окончательная проверка ЛО; 21 - отделение ЛО от ОБК и ориентация ЛО перед включением двигателя ПС; 22 - включение двигателя ПС и переход ЛО на эллиптическую орбиту; 23 - ОБК на круговой селеноцентрической орбите; 24 - ЛО на эллиптической орбите; 25 - включение двигателя ПС для схода ЛО с орбиты; 26 - горизонтальное перемещение ЛО над поверхностью Луны, начало посадки; 27 - посадка; 28 - старт с Луны ВС (ПС остается на Луне); 29 - выход ВС на эллиптическую селеноцентрическую орбиту; 30 - ВС на орбите; 31 - коррекция орбиты ВС с помощью ОД; 32 - переход ВС на круговую орбиту, сближение и стыковка с ОБК; 33 - переход космонавтов из ВС в ОЭ; 34 - отделение ВС (она остается на селеноцентрической орбите); 35 - ОБК на орбите (проверяются бортовые системы); 36 - начало ориентации ОБК перед сходом с орбиты; 37 - переход ОБК на траекторию полета к Земле с помощью маршевого двигателя; 38 - коррекция траектории; 39 - отделение ОЭ от ДО; 40 - начало ориентации ОЭ перед входом в атмосферу; 41 - вход ОЭ в атмосферу; 42 - сбрасывание верхней секции ОЭ; 43 - выброс тормозных парашютов; 44 - отделение тормозных парашютов и выброс вытяжных парашютов; 45 - вытягивание основных парашютов; 46 - развертывание парашютов; 47 - приводнение ОЭ и отделение парашютов. (информация отсюда)
Старт.
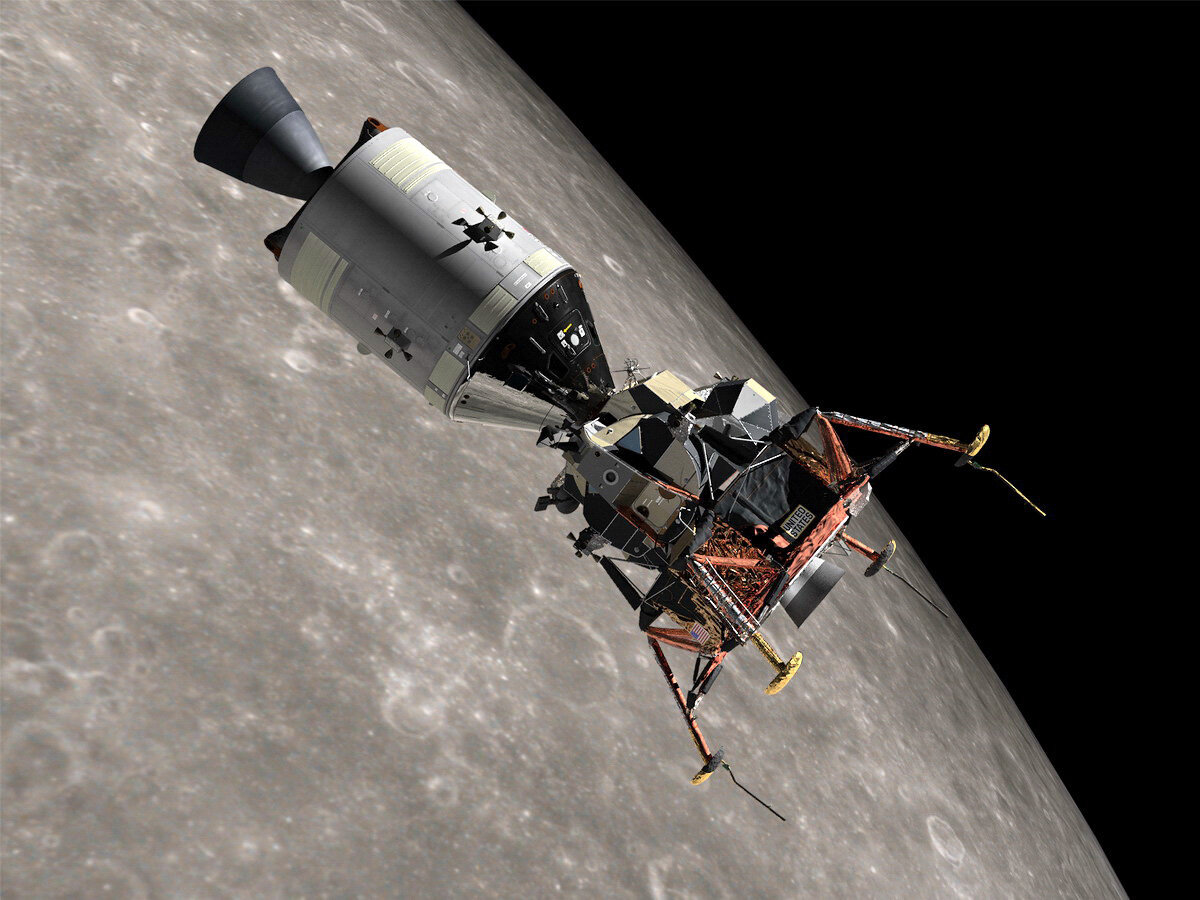
Рассматриваем, опять же, лунный модуль (ЛМ, в ряде источников он имеет другие аббревиатуру и название).
При старте ракета-носителя с поверхности Земли перегрузка увеличивается с 1g (ускорение силы тяжести) до 7g на участке, где тяга двигателей еще максимальна, а масса ракеты уже снизилась из за выработки топлива и окислителя. Причем есть некая закономерность - чем выше перегрузка (или меньше времени вывода на орбиту) тем выше весовая эффективность всей системы.
При выведении на орбиту лунный модуль находился над третьей ступенью Сатурн-5 внутри конического адаптера.
Этот адаптер передавал осевую нагрузку от тяги двигателей на приборный и командный модуль (коническая оболочка хорошо работает на сжатие вдоль своей оси), служил обтекателем для лунного модуля и раскрывался вдоль, когда необходимо было выполнять стыковку орбитального корабля и лунного модуля в конфигурацию окололунного маневрирования.
Масса лунного модуля вместе с топливом составляла около 15 т - это посадочная и взлетная ступени. На эту массу, в процессе выведения, действовала перегрузка, такая же как и на на всю систему - ракетоноситель с полезной нагрузкой.
Какова величина максимальной перегрузки была у системы Сатурн-Аполлон при выведении - мне быстро найти не удалось, но, скорее всего в указанном оптимальном диапазоне. Предположим среднюю величину перегрузки в 5g.
Тогда при взлете силовое взаимодействие между лунным модулем и третьей ступенью составит 75 тс (тонн силы).
Величина вроде как и не большая, а силовой элемент третьей ступени - наружная цилиндрическая оболочка вдоль своей оси выдерживает очень значительную нагрузку.
Кстати, для любознательных - совсем простенький эксперимент:
Простой лист бумаги, в котором жесткости самый минимум (прочность на растяжение, конечно, значительная) будучи свернутым в цилиндрическую обечайку и зафиксированный резинкой легко держит на сжатие нагрузку, на три порядка превышающий собственный вес.
Никакое подкрепление не даст такого результата - а это работа листа в вдоль плоскости а не из нее. Можно сделать складки вдоль нагрузки, что то держать будет, но с цилиндрической поверхностью все равно не сравниться. Причина - в потере устойчивости.
Вернемся к лунному модулю. Эту нагрузку, в 75 тс (или больше, если перегрузка 7g, то 100+ тс) нужно передать на третью ступень. Посмотрим, как это было сделано. Есть любезно предоставленные NASA чертежи:
Как видно по чертежам, ЛМ через кронштейны опор крепится на конический переходник/адаптер. На адаптере есть местные усиления, нагрузка от четырех опор симметричная, опоры между собой завязаны, потому сколь нибудь заметной боковой нагрузки не возникает. Адаптер, в свою очередь, передает нагрузку на цилиндрическую обечайку третьей ступени. Классика, все рационально и хорошо.
А модуль?
В дополнении к схеме можно посмотреть анимацию - ссылку на эту анимацию предоставил в комментариях к предыдущей части Сергей.
С модулем все не так оптимистично. Есть "крест" из плоских панелей, каждый из лучей заканчивается ферменным кронштейном, который крепится к переходнику/адаптеру.
В каждом из "лучей" организовано что то вроде ящика или контейнера, куда вложены четыре - по числу "лучей" бака для топлива или окислителя. Каждый массой по две с лишним тонны - общее количество топлива и окислителя в посадочной ступени немного больше 8 т, плюс сами баки. Вроде как все нормально и даже почти логично. Пустоты только в углах "ящиков" не рациональные, ну да это мелочи.
Посмотрим повнимательнее.
Бак с топливом массой 2 тонны опирается на плоское дно "ящика". Там наверняка с внутренней стороны есть какие то подкрепления. передающие нагрузку на боковые стенки и на замкнутую конструкцию кессона. Это совсем не рациональное, достаточно тяжелое решение. Как минимум, нагрузку от бака надо сразу передавать в "угол" - стык панелей и по этому, относительно жесткому и прочному месту далее нагрузку передают на кронштейн. Может, кстати, там так и решено, просто информация мне такая не попалась, нигде на схемах этого не показано, а это очень важный момент.
Но если посмотреть еще немного повнимательнее.
ЖРД, запускаемые в космосе, при этом не один раз, да еще и дросселируемые, имеют, как правило, вытеснительную систему подачи топлива и окислителя из баков к двигателю. То есть, инертным газом под давлением в баке создается давление, обеспечивающее движение жидких топлива и окислителя к двигателю. Далее управляют клапанами.
Потому баки для топлива и окислителя, по факту, очень прочные и жесткие, и помимо основной нагрузки от внутреннего давления, легко могут нести значительную дополнительную нагрузку, будучи включенные в общую силовую схему. Без какого либо увеличения массы.
Один из примеров:
Ракета-носитель Сатурн-5 - такой же пример использования баков в силовой схеме. Давление в баках все равно создается, хотя и небольшое, кроме того, они должны выдерживать гидростатическое давление столба жидкости при перегрузке. И Союз, и Протон и десятки других ракет и конструкций.
Редкое исключение - использование подвесных баков в Н-1. Но это заслуживает отдельного разговора и обсуждения.
Кстати, прием - использование одних элементов по двум и более назначениям - широко используется в различных областях техники. Всем известный пример - штурмовик Илюшина Ил-2.
Только когда броню включили в силовую схему (в отличии от навесной у предшественников) ЛТХ стали хоть сколь нибудь приемлемые.
Посадочная ступень лунного модуля. Увеличение массы:
За счет подвесных баков.
За счет передача нагрузки от массовых сил через нижнюю плоскую стенку(но это не точно).
За счет использование, при большой строительной высоте (малой интенсивности нагрузки) для восприятия изгибающих и и поперечных нагрузок плоской стенки.
За счет передачи нагрузки на адаптер через изгиб.
Но очень возможно, что использованные там решения имеют какое то дополнительное обоснование, просто я этого не знаю.
И в дополнение, небольшой ликбез про сравнение ферменной конструкции и "ящика" со сплошными стенками.
На один "луч" приходится нагрузка примерно в 20 тс, а на одну стенку "ящика" или ферменной конструкции - 10 тс.
Ферменная конструкция, размеры примерные:
Нагрузка и размеры примерно соответствуют боковой стенке "ящика". Р=10 тс - перерезывающая сила.
R4 в этой схеме равна нулю, но если присоединено "шасси" то будет величина отличная от нуля.
R1, R2, R3, R4 в ферменной схеме и схеме со стенкой равны. Почти, но это мелкие отличия. Основное различие - в ферме перерезывающую силу держит раскос с силой R5, а в стенке эту силу держат касательные напряжения.
R5=12,8 тс. При растягивающих напряжениях в 300 МПа потребная площадь поперечного сечения раскоса 4,3 см2. Длина 1920 мм, а масса 2,3 кг. Все элементы фермы в сумме - 8-10 кг.
Схема со стенкой:
Для начала рассмотрим стенку, которая не теряет устойчивость - достаточно толстая, отношение толщины к высоте примерно 1/100.
Эпюра касательных напряжений имеет параболическую форму, с максимумом в центре. Но при наличии сравнительно мощных верхнего и нижнего пояса с достаточной степенью точности на первом этапе расчета заменяется на прямоугольное распределение - как показано на рисунке справа.
Касательные напряжения, как разрушающие так и допустимые соотносятся с нормальными напряжениями через коэффициент 0,6.
Отсюда потребная площадь поперечного сечения стенки 10/(3*0,6)=5,5 см2. Толщина стенки при этом 0,03 см (0,3 мм) а вес 1,9 кг.
Плоская стенка выигрывает у подкоса? Казалось бы, да. Не зря лонжероны практически всех самолетов делают со сплошной стенкой, а не ферменные.
Но в допущениях мы приняли предположение, что стенка не теряет устойчивость и получили фольгу толщиной 0,3 мм. Стенка такой толщины будет достаточно хорошо работать только до размера примерно 0,3*100=30 мм (и даже несколько менее, поскольку там не линейная зависимость от размеров). У нас размер примерно в 50 раз больше и стенка гарантированно теряет устойчивость.
Напряжения в любом элементе стенки выглядят примерно так:
По периметру показаны касательные напряжения - они попарно друг друга компенсируют.
Но касательные напряжения - в некотором роде условность, и они эквивалентны двухосному напряженному состоянию нормальных напряжений, то, что показано в центре. По одной оси под углом в 45 градусов - растяжение, по другой, под 90 градусов к растяжению - сжатие.
Но так как тонкая стенка на сжатие не работает, а теряет устойчивость то мы получаем такую картину:
Силовые элементы, образующие периметр, нагружаются изгибом - одним из самых "не выгодных" видов нагружения. И что бы им противостоять их момент сопротивления изгибу, и, как следствие, сечение, нужно многократно увеличить. В сравнении с элементами, работающими только на растяжение/сжатие, проигрыш по массе значительный. В "продолжении 4" была показана разница между растяжением и изгибом в 50 раз. В сегодняшнем случае не столь значительно, но до 5 или даже 10 раз может быть. Тонкая стенка - не вариант.
Возможен компромиссный вариант - относительно толстая стенка (1,5 - 2 мм) с развитым подкреплением, невысокие действующие напряжения, меньше потери устойчивости пластины. Тогда получается примерно то, что мы видим на фото - размер между подкрепляющими стрингерами примерно 200 мм (2*100=200 мм) и относительно слабые пояса. Но в этом случае только "голая" стенка будет весить около 10 кг. Плюс подкрепления, плюс силовые элементы - около 20 кг в совокупности. Разница в массе с фермой - примерно в 2 раза.
Стыковка.
Из энциклопедии:
СТЫК´ОВКА (космич.), сближение и соединение космич. летат. аппаратов на орбите. Осуществляется автоматически или космонавтами (ручная С.). Первая ручная С. произведена 16.3.1966 (С. корабля "Джемини-8" с ракетой "Аджена", США), автоматическая - 30.10. 1967 (С. ИСЗ "Космос-186" и "Космос-188", СССР).
Первая стыковка:
Кое кто из критиков американской космической программы пишет подобные кляузные тексты:
"На этом чудеса американской технологии и невероятного «прогресса» не закончились. Американцы придумали систему стыковки…без стыковочного узла! Если верить схеме, «стыковка» по-американски ограничивалась касанием носовой части капсулы «Джемини- 8» в раструб мишени «DOCKING ADAPTER». Ни в носовой части «космической» кастрюли, ни в самой мишени, не было ничего, чтобы напоминало реальный стыковочный узел. Касание «Джемини-8» с этой мишенью, американские обманщики называли «стыковкой». Какие «космические полеты», такие и «стыковки», выдуманные и фальшивые."
Но это первые шаги, а в космосе на орбите у массивного тела даже простое сближение двух аппаратов очень не простое.
Напомню пример из школьной физики: если два аппарата находятся на одной круговой орбите, но на каком то расстоянии друг от друга, то сблизится им по простой "земной" логике - просто увеличив скорость отстающего аппарата - не получится.
Этот отстающий аппарат, при работе двигателя в сторону увеличения скорости, наберет некоторое количество высоты - перейдет на более высокую орбиту - и замедлит свою скорость, еще больше отстав от лидирующего аппарата. Не круговые орбиты и влияние атмосферы на малых высотах еще больше усложняют задачу.
Потому можно считать, что непосредственно по стыковкам опыт у американских астронавтов был значительный, и в этом плане никаких особых вопросов не возникает.
При стыковке используются стыковочные узлы, совмещенные с люком.
Стыковочные узлы и люки, как правило, вмонтированы в сферические или конические оболочки.
Здесь необходимо рассмотреть нагрузки, которые действуют на стыковочный узел. После того, как отдельные аппараты между собой состыкованы, нагрузку на стыковочный узел создают или двигатели маневрирования/ориентации или один из основных двигателей космического аппарата. Одного или второго.
Нагрузки от двигателей ориентации приложены под углом к продольной оси сборки, до 90 градусов, и на большом плече. Но само это усилие очень небольшое и нагрузка вполне приемлема.
Основные двигатели имеют значительно большую тягу, нежели двигатели ориентации, но их тяга направлена вдоль оси сборки и нагружает стыковочный узел продольной силой.
В случае Аполлона это тяга его основного двигателя, поделенная в пропорциональном соотношении состыкованных масс.
Но самые большие нагрузки развиваются непосредственно в момент стыковки.
Это две достаточно большие массы: 15 т лунного модуля + третья ступень ракетоносителя с одной стороны, и командный модуль со служебным общей массой почти в 30 т - с другой стороны.
Усилие, развиваемое в момент стыковки, есть ускорение, помноженное на массу.
Ускорение, в свою очередь, зависит от скорости (относительной, двух аппаратов друг относительно друга) и времени, за которое она гасится. Или, в привязке к стыковке - расстояние, на котором она гасится.
Чем больше расстояние и меньше скорость тем меньше ускорение.
Если движение равнозамедленное, то ускорение есть квадрат скорости деленный на удвоенное перемещение. Если взять скорость в 0,5 м/с а путь на котором эта скорость гасится 10 см то ускорение получается примерно 1 м/с2 - 0,1g. Цифры приблизительные, для оценки порядка величины.
То есть на стыковочный узел действует сила около 2 тс. Не много.
Но чем она воспринимается?
На командном модуле все хорошо - стыковочный узел закреплен в конической оболочке, выдерживающей очень большую нагрузку даже при очень малой толщине.
А у ЛМ?
Посмотрим схему:
Опять "любовь" к плоским поверхностям - стыковочный узел закреплен на плоской стенке.
Работа из плоскости даже если нагрузка строго осевая, и гораздо более сложное и более нагруженное состояние, если небольшое отклонение от оси или один из аппаратов слегка вращается вокруг поперечной оси. Тогда все догружается дополнительным изгибом.
Можно сделать ее (плоскую стенку) толстой, сильно подкрепленной, и даже двойной, соединенной в пространственную конструкцию дополнительными элементами.
Но зачем? Все эти решения ведут к увеличению массы.
Продолжение в следующей части...