Актуальность исследования
Обеспечение безопасности плавания морских судов зависит от точности местоположения. Основным прибором, определяющим местоположение судна, является приемник глобальных навигационных спутниковых систем (далее ГНСС-приемник).
Оценка точности полученных данных с навигационных спутников для морского судна одинаково важна как в прибрежном плавании, так и на трансокеанском переходе. В случае потери геопозиции, требуются решительные и правильные действия от судоводителя. Задачи навигации в значительной мере сводятся к определению текущих координат морского судна, а также к определению скорости и направления его движения. Кроме того, приемники ГНСС являются надежными приборами. Тем не менее существуют ситуации, когда их работоспособность может нарушаться. Эти ситуации маловероятны, но в то же время современный судоводитель должен быть к ним готов. Такие ситуации включают в себя, в частности, помеховую атаку, ложное наведение, загрубление ГНСС-сигнала, неисправность ГНСС-оборудования, геомагнитное возмущение.
В Резолюции IMO 1046 перечислены актуальные требования к ГНСС-приемникам:
- точность определения места судна (далее ОМС) в прибрежных районах – 5 м.;
- точность ОМС в открытом море/океане до 100 м .
В наиболее развитых районах морского судоходства доступны системы дифференциальной коррекции (Satellite Based Augmentation System (далее – SBAS )), такие как: EGNOS ; СДКМ; MSAS ; AFI ; WAAS SACCSA ; GAGAN ; MSAS ; MALASIA .
В сумме при условии использования этих систем, современная аппаратура ГНСС даст точность позиции до 2-3 м. Не один другой способ из навигации не может сравниться по точности с использованием ГНСС.
Недостатком ГНСС является не автономность и возможность заглушить радиосигнал. В этой связи актуальным становится вопрос, справятся ли современные судоводители со своими задачами при маловероятном, но возможном сценарии потери либо заглушении ГНСС-сигналов.
Обзор навигационной аппаратуры, требующей наличия информации от ГНСС
Современный ГНСС-приемник работают не только как самостоятельное устройство (определение позиции, курса ( COG – course over ground ), скорости ( SOG – speed over ground )), но и передает сигнал для других судовых систем. Существуют критически и не критически зависимая от ГНСС-сигнала судовая аппаратура.
Критически зависимая аппаратура включает такие судовые системы, в которых в случае поступления ложного ГНСС-сигнала или его отсутствия теряются основные функции или полная работоспособность.
Некритически зависимая аппаратура включает такие судовые системы, в которых в случае поступления ложного ГНСС-сигнала или его отсутствия не влияет на работоспособность прибора.
К критически зависимой судовой аппаратуре относится:
1) ЭКНИС – электронно-картографическая навигационно-информационная система ( ECDIS – Electronic Chart Display and Information System )
2) АИС – автоматическая идентификационная система (AIS – Automatic Identification System )
3) Авторулевой (AP – Autopilot )
4) РЛС/САРП – радиолокационная станция/средство автоматической радиолокационной прокладки (RADAR /ARPA – Automatic Radar Plotting Aids )
5) РДР – регистратор данных рейса «черный ящик» (VDR – Voyage Data Recorder )
6) ИСМ – интегрированные системы ходового мостика (IBS – Integrated Bridge Systems) – это включающий в свой состав несколько систем программно-аппаратный комплекс , в котором применен системный подход к автоматизации процессов сбора, обработки, отоборажения информации, к выполнению функций навигации, управления судном, радиосвязи и обеспечения информации с целью достижения максимальной эффективности вахты на мостике квалифицированным персоналом.
7) ИНС – интегрированные навигационные системы (INS – Integrated Navigation Systems) комплексно используют информацию нескольких навигационных датчиков.
8) ГМССБ – глобальная морская система связи при бедствии (GMDSS - Global Maritime Distress Safety System)
9) СДИ – системы дальней идентификации и контроля местоположения судов (LRIT - Long Range Identification and Tracking)
10) ДП – динамическое позиционирование (DP – Dynamic Position ) – заключается в совмещении той или иной точки корпуса судна с заданной точкой акватории с помощью судовых средств управления.
11) швартовый лаг (Docking speed Log ) – прибор обеспечивает точную швартовку судов валовой вместимостью свыше 50 тыс. для погрузки / разгрузки, а также обеспечение безопасной навигации в узких каналах и проливах.
Некритически зависимой является следующая аппаратура:
1) Гирокомпас (Gyrocompass);
2) Эхолот (Echo-Sounder);
3) Лаг (Log );
От работоспособности ГНСС зависит эффективность работы береговых служб, таких как:
1) СУДС – береговые службы управления движением судов (VTS – Vessel Traffic Services),
2) береговые спасательные центры.
Оценка возможных ситуаций, при которых ГНСС-сигнал может прерываться
Ситуации, при которых ГНСС-сигнал может теряться, приведены на блок-схеме . Данные ситуации условно можно подразделить на 3 вида.
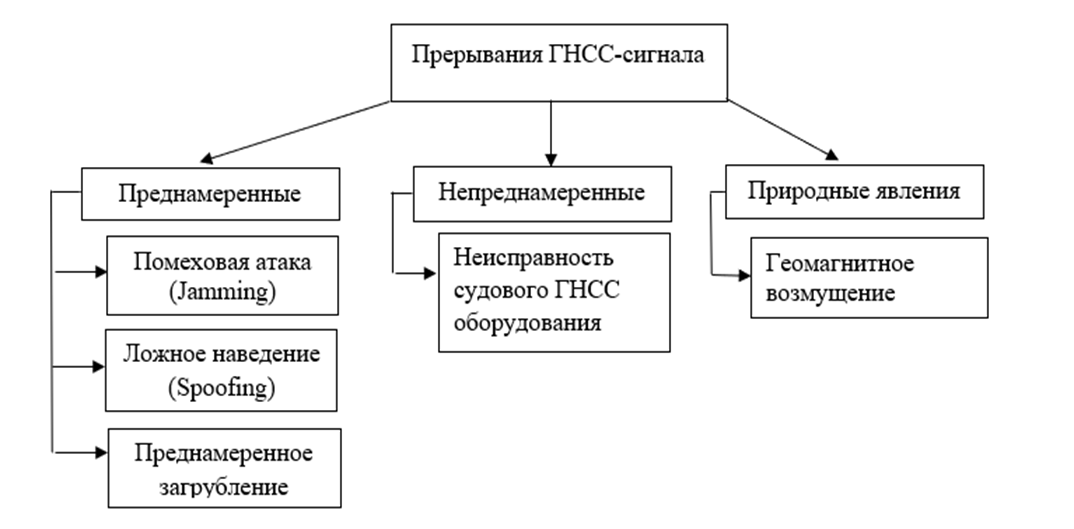
К ситуациям намеренного отключения или искажения ГНСС-сигнала относятся:
1) помеховая атака ( Jamming ), которая предотвращает прием ГНСС-приемником координат и ведет к нарушению работоспособности обычно путем введения достаточно сильного постороннего шума в частотах ГНСС. Атака может быть произведена любым радиопередатчиком, работающим в диапазоне частот ГНСС-приемника ( L 1). Преднамеренное глушение ГНСС-сигнала может быть осуществлено, например, военными кораблями в процессе проведения военных операций или правонарушителями (в т.ч., пиратами) при использовании портативных глушителей ГНСС-сигнала, что является противоправным во многих странах мира. Примеры портативных глушителей представлены на рисунке. Радиус действия портативного глушителя частот ГНСС-приемника ( L 1) от 10-200 м. в зависимости от размера и его размера.

- ложное наведение ( Spoofing ) намного сложнее, производится путем имитации настоящего ГНСС-сигнала. Это требует создания достаточно мощного поддельного сигнала, который подавляет реальный сигнал на приемнике. В этом смысле это похоже на глушение, но сигнал теперь должен быть достаточно мощным, чтобы его можно было интерпретировать как настоящий сигнал, не говоря уже о том, что он должен иметь соответствующее содержание. Применение спуфинга позволяет не только разрушить решение основной задачи координатно-временных определений потребителя, но и навязать решение ложной задачи в интересах постановщика спуфинга. Злоумышленник перехватывает управление над приемником навигационного сигнала и устройством, в котором он установлен. На основе передаваемого ложного сигнала приемник вычисляет ошибочные координаты своего местоположения. Изменение местоположения происходит постепенно, чтобы устройство не включило режим блокировки, и злоумышленник в этот момент не стал лишь передатчиком помех. Получив контроль над устройством, злоумышленник может использовать его в своих интересах. При спуфинге определить дезинформирующий сигнал непросто, и выходные данные можно принять за надежные результаты. Таким образом, обнаружение спуфинга и методы борьбы с ним представляются очень важными. На рисунке показана одна из возможных схем реализации спуфинга.
- загрубление ГНСС-сигнала. Так как ГНСС являются контролируемыми со стороны государств, это не исключает внесение постоянной погрешности определения координат при использовании в потребительских целях. Так в истории есть пример. ГНСС GPS, которая была создана в США, первоначально предназначалась для использования в военных целях, но стала доступной для гражданского использования в 1983 г., после сбитого Boeing 747 над Сахалином в судоходной и авиационной отраслях. Но Министерством обороны США была создана программа избирательной доступности (Selective Availability , SA ), искусственно снижающей точность гражданского GPS для противодействия использования гражданских GPS-приемников в военных целях. В период с 1983 г. по 2000 г. для гражданских пользователей была искусственно создана погрешность, которая достигала примерно 100 м. В мае 2000 года режим SA был отключен, что повысило точность гражданских GPS-приемников до 15 м. На рисунке 4.4 продемонстрирована между включенной и выключенной SA , а также при использовании систем дифференциальной коррекции ( WAAS ). Система избирательной доступности была отключена в связи с тем, что в настоящее время у Министерства обороны США появилась техническая возможность применения загрубления ГНСС-сигнала определенных участков земного шара на необходимый период времени.
К ситуациям непреднамеренного отключения ГНСС-сигнала относятся те случаи, при которых причиной глушения ГНСС-сигнала является неисправный приемник, либо любое другое устройство, способное создавать помехи (шум) на частоте L 1. Данную ситуацию можно назвать точечной, т.к. потеря ГНСС-сигнала будет наблюдаться только на судне. На судах, проходящих вблизи с неисправной ГНСС, возможны сбои в работе систем позиционирования, но это зависит от мощности сигнала, передаваемым неисправным приемником.
К ситуациям отключения ГНСС-сигнала, связанное с природным явлением, можно отнести к геомагнитному возмущению.
Возмущения геомагнитной обстановки влияют не только на электронное и радиотехническое оборудование. Сильная геомагнитная буря может привести к выходу из строя спутникового сегмента радионавигационных систем. Такие явления достаточно редко, но их последствия проявляют себя в той или иной степени по всему Земному шару.
На Солнце время от времени происходят активные явления, например:
1) выбросы масс;
2) вспышки;
3) ударные волны.
Эти явления приводят к появлению энергетических частиц «солнечного ветра», которые разлетаются от солнца в разные направления, в том числе в направлении Земли, и попадают в магнитосферу. Когда ударная волна, которая возникает перед выбросом массы, сталкивается с магнитосферой, МПЗ начинает возмущаться, колебаться, дрожать. Этот процесс и называется геомагнитной бурей.
Примеры из морской практики
В период работы на судне мною было дважды зафиксирована потеря сигналов ГНСС. 3 января 2020 года в 02:47 UTC судно стояло на якоре в территориальных водах Мальты вблизи порта Марсашлокк. ГНСС-приемник выдал ошибку – « GPS NO FIX » и сопровождалось громким сигналом. Приемник показал крайние зафиксированные показания широты. После того, как ошибка потери ГНСС-сигнала появилась на экране GPS -приёмника, значение скорости относительно грунта, стоящего на якоре судна, изменялось в диапазоне от 0 до 77.2 узлов .
Еще один случай был зафиксирован также в территориальных водах Мальты при подходе к порту Валлетта. За 3.5 мили до захода в порт Валлетта 01 марта 2020 года в 20:47 UTC на навигационном мостике GPS -приемник GP -32 выдал ошибку « No Fix » . После полученной ошибки, системы, связанные с ГНСС-приемником, одновременно начали генерировать тревожные сообщения о потере информации ГНСС.
Это вызвало сбой в работе систем управления движением. Многие суда останавливались и ждали восстановления работы ГНСС-приемника. Однако, на судах которых был установлен ГНСС-приемник ГЛОНАСС, не было зафиксировано никаких сбоев. Согласно наблюдениям экипажей судов, у берегов Ливии и Мальты с периодичностью 2 раза в год (зимой и летом) происходят сбои в работе ГНСС-приемников.
Оценка последствий на судне при потере функциональности аппаратуры, зависимой от ГНСС-сигналов
Потеря функциональности аппаратуры, зависимой от ГНСС-сигналов, является одной из причин аварий, связанных с судовождением, несмотря на развитие и доступность современных судовых и береговых систем, предназначенных для улучшения понимания ситуаций и качества принимаемых решений . Данный функционал отсутствует в аппаратуре при отсутствии сигнала от ГНСС.
Представим обзор функционала аппаратуры, критично зависящей от ГНСС- сигнала:
- Electronic Chart Display and Information (далее – ECDIS ) является системой, зависимой от сигнала с ГНСС-приемника. При отсутствии сигнала позиционирования в системе ЭКНИС, данный прибор теряет свою основную функцию – местоположение на карте и судов, снабженной системой AIS , в реальном времени. Так же на приборе не будут отображаться данные с ГНСС-приемника о скорости и курса относительно грунта. В этой ситуации данный прибор теряет свою актуальность и становится «бумажной картой». В случае поступления некорректного сигнала позиционирования, реальное отображение позиции является ложным и может ввести судоводительский экипаж в заблуждение.
- AIS. Потеря связи со спутником критично для устройства. Прибор предоставляет информацию (название, ИМО-номер, Call sign , местоположение, курс, скорость и т.д.) о судах, находящихся рядом с приемником и передает ее на различные судовые устройства: РЛС/САРП, ЭКНИС. При поступлении некорректного сигнала, устройство может предоставить ложную информацию о судах, находящихся по близости.
- Использование авторулевого в режиме управления движения судна по траектории непосредственно зависит от поступающего сигнала. В данном случае с приемника ГНСС поступает информация о маршруте судна, расстояния до следующей путевой точки, заданные ограничения и «самое важное» местоположения судна. При отсутствии этих данных с приемника авторулевой не сможет выполнять данную функцию и подаст звуковой сигнал, означающий ошибку.
- На экране радиолокационной установки не будут отображаться параметры движения цели, полученные от устройства АИС и будет отсутствовать информация о SOG и COG. Непосредственное использование РЛС возможно.
- Прибор регистрации данных о рейсе. Система предназначена для сохранения информации, получаемой со всех судовых систем (скорость, курс, состояние судна и т.д.), а также команд и управления судна в определенный период времени. Данные фиксируются относительно полученных координат и времени UTC с ГНСС-приемника. Соответственно отсутствие либо некорректно поданный ГНСС-сигнал лишает прибор выполнения заложенных функций.
- Система динамического позиционирования (далее ДП) является частью интегрированной системы управления судном и служит для удерживания судна в заданном местоположении и курсе. Для корректной работы данного прибора необходимо непрерывное поступление данных с гирокомпаса и ГНСС-приемника. При отсутствии ГНСС-сигнала возможно сохранения позиции судна при использовании резервных способов: Artemis ; Taut Wire ; гидроакустические датчики.
- Швартовый лаг – прибор, использующийся при швартовочных операциях, демонстрирующий направление движения и скорость носовой и кормовой части судна относительно причальной линии. ГНСС-приемник передает данные о местоположении судна, скорости и курса относительно грунта. Причальная линия отображается на экране прибора за счет координат, вводимых заранее в устройство. В прибор также вносятся данные о размерах судна, чтобы в взаимодействии с ГНСС-приемником отображение местоположения судна относительно заданной причальной линии было возможно. При наличие всей поступающей информации судоводителю отображается динамика движения судна относительно причальной линии. В случае отсутствия надлежащего ГНСС-сигнала данный функционал прибора является недоступным.
Обзор функционала некритической аппаратуры:
1) Гирокомпас позволяет измерить HDG (heading), то есть курс судна, в то время как GPS дает нам информацию о направлении перемещения точки установки антенны относительно грунта или ее COG (course over ground) – путевой угол. Разность COG и HDG дает нам суммарный угол дрейфа. В ряде современных гирокомпасов существует функция автоматического задания широты и скорости на цифровой блок коррекции ГК, что является наиболее надежным способом устранения указанных погрешностей. Однако при выходе из строя лага или GPS приемника, могут соответственно возникнуть и ошибки в показаниях гирокомпаса. Гирокомпас потеряет свою точность, т.к. не будет коррекции на скоростную девиацию. Для быстроходных судов является критичным. В данном случае гирокомпас по своему функционалу приравнивается к магнитному.
2) Эхолот при потере сигнала-ГНСС не теряет своего функционала. Отображение местоположения в точке измерения глубины под килем судна не будет отображаться, но на основную функцию прибора это никак не влияет.
1) Лаг при отсутствии сигнала-ГНСС не будет дублировать информацию, поступающей с приемника, но при этом сохраняет свой функционал.
В любом случае потеря ГНСС-сигнала на борту судна сопровождается множественными звуковыми сигналами (Alarms ), сигнализирующими о наличии ошибки. В условиях форс-мажорных ситуаций судоводительскому составу навигационного мостика необходимо своевременно отреагировать и обнаружить причину неисправности с целью безопасного движения. Недостаточная квалификация штурмана может привести к неблагоприятным последствиям. В соответствии с этим, не стоит брать во внимание только данные с ГННС-приемника, а также использовать резервные методы ОМС. При потере источника позиционирования судно не соответствует Резолюции IMO 1046(27) .
Невозможность определения позиции с требуемой точностью ставит под угрозу безопасность плавания в условиях прибрежного плавания (фарватеров, узкостей, в акваториях порта и т.д.), где существует большое скопление навигационных опасностей, что особо критично и опасно при условии интенсивного трафика в стесненных условиях, а также при движении судна «в слепую» в условиях плавания во время ограниченной видимости. Следует заблаговременно определять зоны, где существует вероятность потери сигнала, и используется лоцманская проводка, с помощью которой можно следовать безопасно в прибрежной зоне.
Зависимыми от ГНСС-сигнала также являются и береговые системы, такие как Управление службой движения судов (VTS), которая состоит из мониторинга ситуации движения, информационных услуг, услуг службы организации движения (TOS), услуг службы навигационной помощи (NAS), обнаружения и проверки инцидентов и других процедур. Данная система также зависит от сигналов позиционирования. В случае отсутствия ГНСС-сигналов VTS теряет следующие преимущества:
1) получение информации об условиях плавания;
2) управление информацией об этих условиях;
3) оценку гидрометеорологических и гидрографических условий;
4) идентификацию и отслеживание движения судов;
5) оценку ситуации движения и ряд других услуг.
Выработка мер по обеспечению безопасности в случае отказа ГНСС
Следствием потери или получения ложного ГНСС-сигнала на судне является отсутствие точного позиционирования. Так как предугадать потерю сигнала и дальнейший сценарий – практически невозможно, в этом случае недостаточная квалификация судоводительского состава в вопросах использования резервных способов ОМС, может привести к тяжелым последствиям. Во избежание таких последствий следует регулярно проводить тренировки по резервным способам ОМС, включая астрономический. Данный способ рекомендован в правиле II/2 Конвенции ПДНВ.
Современные навигационные мостики снабжены большим количеством аппаратуры, которые связаны между собой, что значительно упрощает работу штурмана. Соответственно судоводительский экипаж должен быть в полной мере знаком со всеми функциями навигационного оборудования. Одним из главных устройств, передающих сигнал на другие системы, является ГНСС-приемник. При отказе работы данного устройства следует предпринять следующие меры для обеспечения безопасного плавания:
При невозможности восстановления ГНСС-сигнала и установления причин его потери судоводителю необходимо уметь использовать следующее навигационное оборудование в условиях ограниченного функционала:
- ЭКНИС ( ECDIS) переводится в режим dead - reckoning ( DR ) с наложением радара для точного построения своих позиций. Dead Reckoning (DR) судоводителю вводить координаты вручную. Далее следует вести свою прокладку по счислению от последней точной позиции с учетом дрейфа и течения, если есть данные о постоянных течениях в этом районе плавания. При наличии навигационных ориентиров, используя функцию « Manual fix position », можно определить свое точное местоположение, невязку и продолжить маршрут уже от точного местоположения. Используя различные комбинации навигационных средств, судну можно сохранить свою ситуационную осведомленность и безопасно прибыть в порт.
При подключении режима EP (estimated position) появляется возможность ввода ожидаемого набора и дрейфа, а также наличие вектора, проецирующего вашу позицию на 24 минуты вперед.
Положение судна также может быть обновлено вручную в системе ЭКНИС с помощью опции «установить курсором» в разделе датчики. Это дает возможность разместить судно рядом с буями в канале.
- Авторулевой п ри потере ГНСС-сигнала переводится в ручной режим управления или в режим движения судна по курсу. При использовании ручного режима следует привлечь рулевого для управления судном.
- Прибор РЛС с датчиком САРП при потере ГНСС-сигнала используется частично, датчик САРП не может выполнять свои заданные функции . Судоводитель осуществляет следующие действия при использовании маневренного планшета и экрана РЛС: 1) нанесение начальной ситуации на планшет и построения треугольников скоростей векторов относительной скорости; 2) оценка ситуации опасного сближения (столкновения) с судами, эхо-сигналы которые наблюдаются на экране РЛС, путем расчета времени кратчайшего сближения t кр, дистанции кратчайшего сближения DKр и выявления потенциальной опасностей; 3) производится выбор и обоснование маневра, выделения судов, с которыми необходимо расходиться; 4) расчет выбранного маневра с помощью графического перестроения векторных треугольников начальной ситуации; 5) расчет момента начала маневра (с учетом маневренных элементов судна), выбирается упрежденное время (3 или 6 мин), дистанция расхождения, время расхождения и дистанция отхода от своего первоначального курса за время маневрирования; 6) нанесение ожидаемой линии относительного движения (ОЛОД) и последующий контроль за перемещением судна-цели (наблюдаемого судна).
- DP . Капитаном судна принимается решение сможет ли прибор, используя другие системы контроля позиции, курса и датчики, в отсутствии ГНСС-сигнала выполнять свою задачу. Системы контроля позиции: fanbeam (фанбим) – это лазерный датчик, предназначенный для постоянного отслеживания дистанции и пеленга с высокой точностью между оффшорным судном и морским сооружением (таким как риг, платформа и т.д.); Artemis – для определения позиции по расстоянию и угла поворота антенн береговой и находящийся на судне радиолокационных станций; Taut Wire – это система , когда на дно опускается тяжелый груз, подвешенный на тросе. Датчик меряет силу натяжения и троса и угол отклонения от вертикали, определяя таким образом как изменилось положения судна. Также, датчик поддерживает силу натяжения троса, если судно совершает движения по вертикали. Основной недостаток- невозможность использование на большой глубине. Гидроакустические датчики, данный метод определения относительного местоположения между передатчиком и приемником под водой. Используя данные системы возможно использования системы динамического позиционирования, при благоприятной погоде.
- В случае потери сигнала с ГНСС-приемника на гирокомпас не будет поступать значение широты, соответственно не будет производится коррекция на скоростную девиацию. В условии форс-мажорных ситуациях судоводителю придется производить ввод в ручном режиме.
Кроме того, при потере ГНСС-сигнала судоводителю, при обнаружении близ проходящего судна, необходимо связаться с ним для получения информации о наличии ГНСС-сигнала на их приборах.
Заключение
В ходе выполнения научно-исследовательской работы была достигнута поставленная цель, произведена оценка возможных последствий отсутствия ГНСС-сигналов для современного высокоавтоматизированного морского судна.
Результатом выполнения научно-исследовательской части выпускной квалификационной работы стало следующее:
1. В ходе исследования было выявлено, что потеря ГНСС-сигналов для современного судна и экипажа крайне серьезна, так как при этом наблюдается потеря функционала следующих устройств: ЭКНИС, АИС, авторулевой, РЛС/САРП, прибор регистрации данных о рейсе, система динамического позиционирования, швартовый лаг и гирокомпас.
2. Однако, выход из строя современных мультисистемных ГНСС-приемников маловероятен, но тем не менее возможен, в частности, при намеренном глушении сигнала ( jamming ), при наведении ложного ГНСС-сигнала ( spoofing ), при геомагнитном возмущении, а также намеренном вводе помех центром управления ГНСС.
3. В ситуациях потери ГНСС-сигнала навигационные приборы судна теряют следующий функционал: ЭКНИС теряет возможность отображения судна в реальном времени относительно местоположения на карте, АИС/ LRIT – не будет передавать и получать информацию о судне другим судам и пользователям, использование авторулевого в режиме движения судна по траектории будет невозможным, датчик САРП перестанет функционировать, получение информации о D кр и t кр не будет поступать на устройство, также не будет доступным функция проигрывания маневра, регистратор данных рейсов не будет фиксировать информацию относительного своего местоположения, швартовый лаг не сможет отображать заданную причальную линию и динамику движения судна относительно нее, гирокомпас потеряет функцию автоматической поправки на скоростную девиацию.
4. Действия судоводителя в случае описанных ситуаций должны осуществляться следующей последовательности: 1) зафиксировать крайнюю точную позицию, полученную с ГНСС-приемника; 2) вызвать на навигационный мостик дополнительного вахтенного помощника, усилить радиовахту; 3) при необходимости выставить впередсмотрящего; 4) судоводителю следует проверить на работоспособность другие ГНСС на мультисистемных приемниках. В случае неработоспособности других ГНСС; 5) произвести выявление источника помех; 6) при не выявлении источника помех, судоводитель должен использовать навигационную аппаратуру в условиях ограниченного функционала. В дальнейшем ОМС судна будет проводиться резервными методами. В открытом море астрономическим способом, а в прибрежном плавании посредством дистанций и пеленгов на навигационные ориентиры.
Следовательно, можно сделать вывод, что функционал ГНСС существенно облегчает работу современного судоводителя и повышает безопасность судовождения. Вместе с тем, судоводители должны знать и уметь использовать резервные способы ОМС и ведения счисления, в случае маловероятных ситуаций выхода из строя ГНСС. Таким образом, проиллюстрированные в работе ситуации подтверждают необходимость изучения таких классических дисциплин в науке судовождения как: навигация, мореходная астрономия и технические средства судовождения.
#spoofing #jamming #gps no fix #ГНСС #gnss #работа в море #gps навигатор #не работает gps #моряк